

torpedo
-
Gesamte Inhalte
25 -
Benutzer seit
-
Letzter Besuch
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Beiträge erstellt von torpedo
-
-
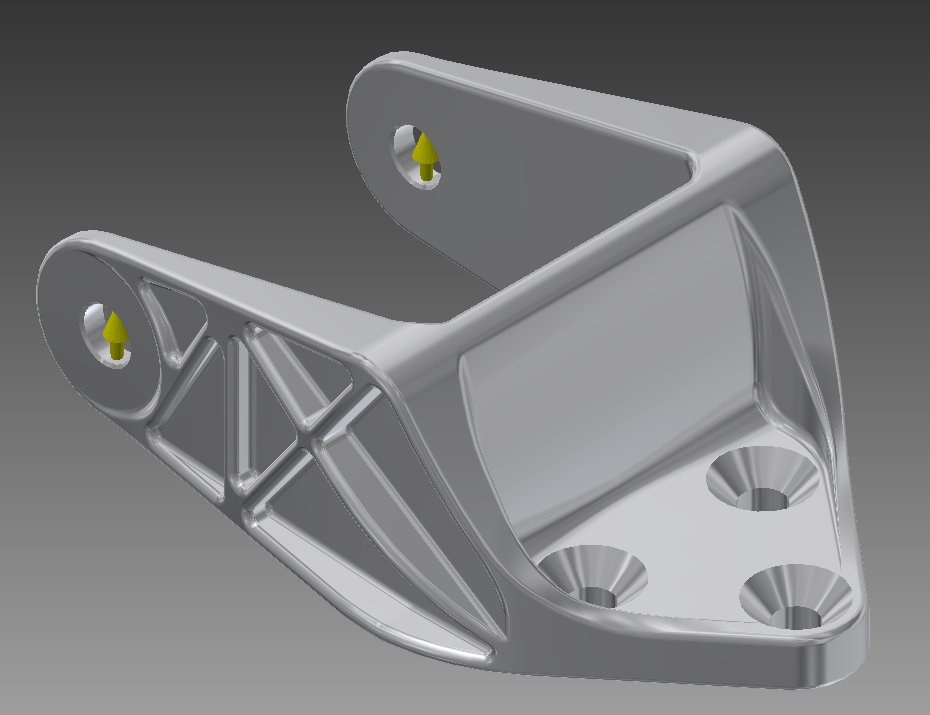
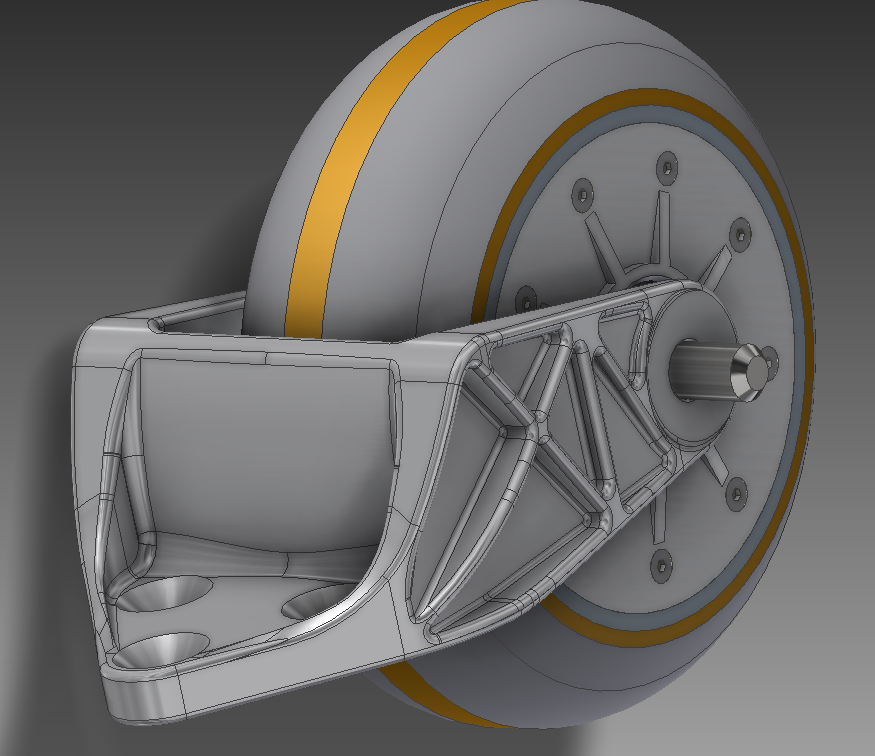
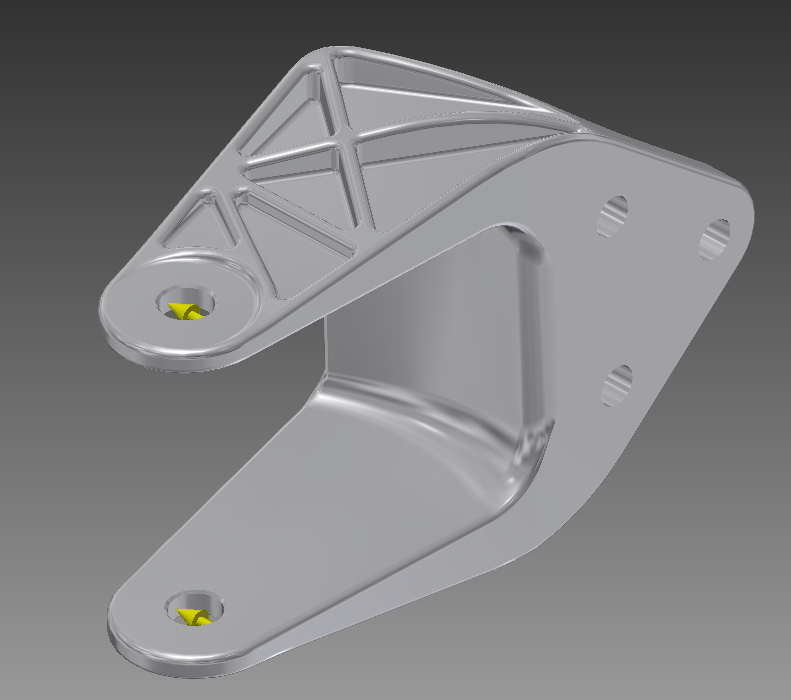
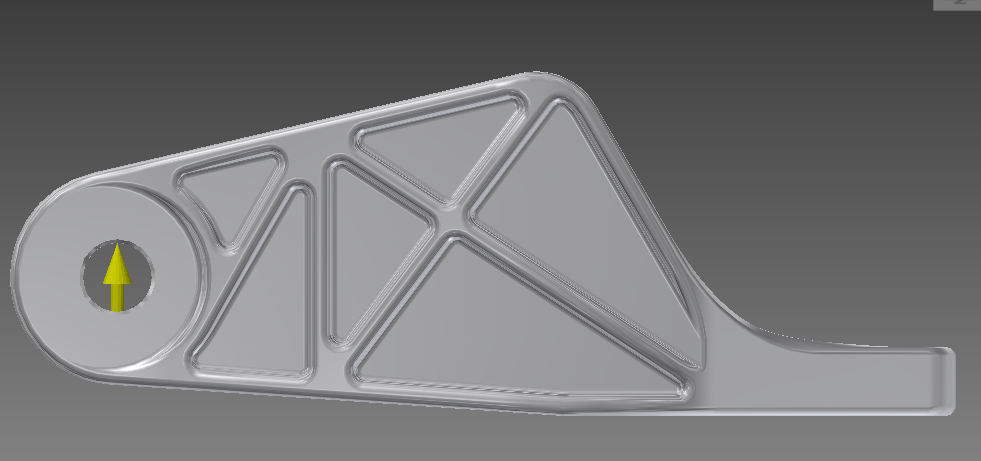
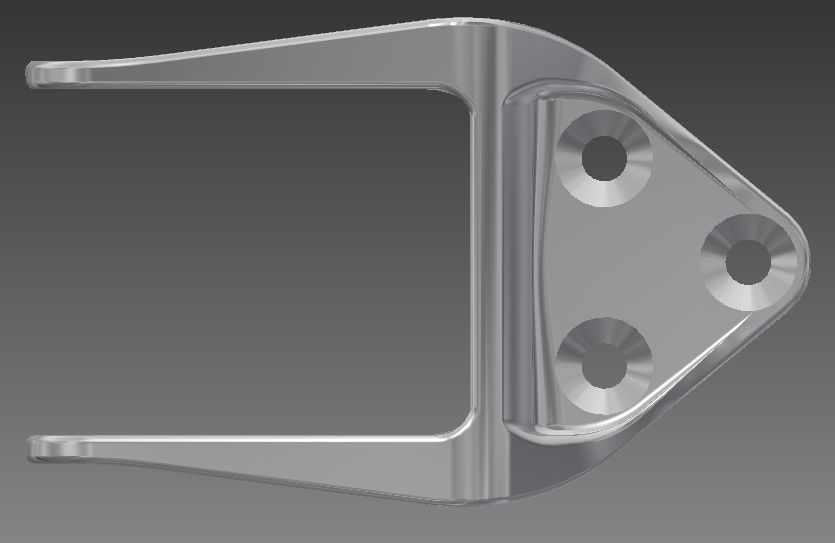
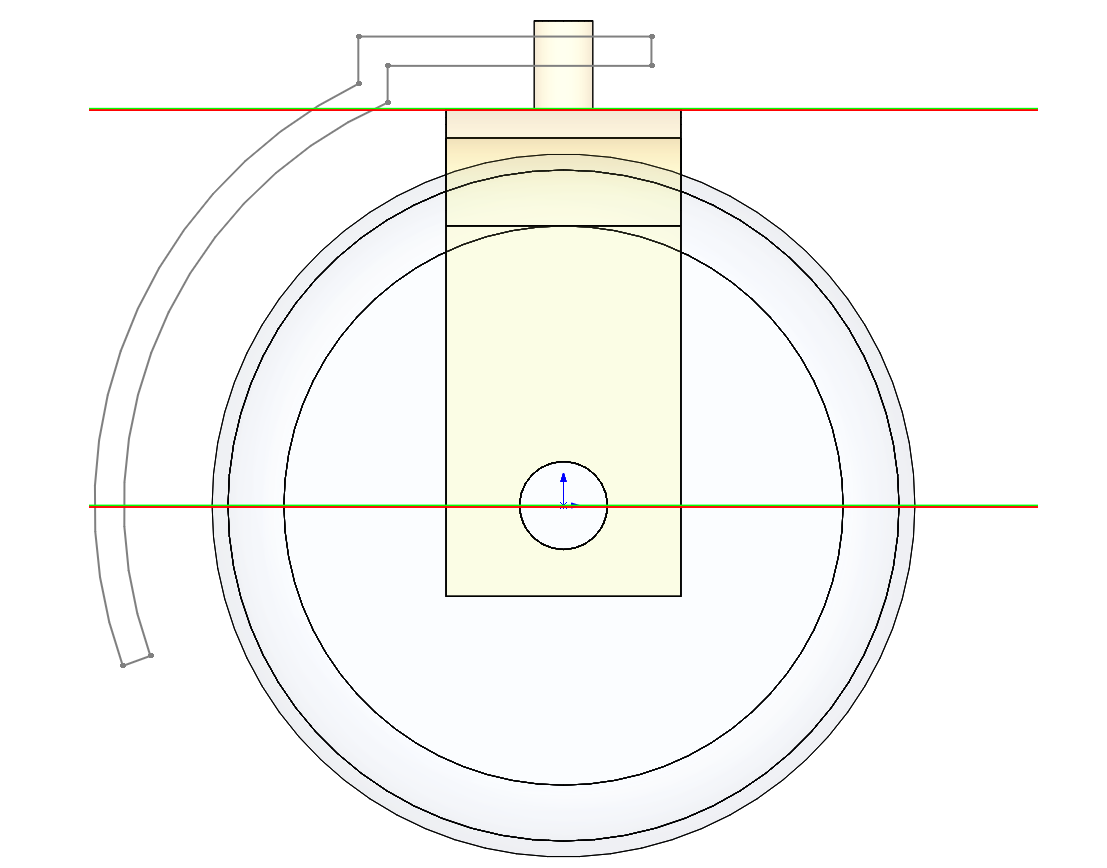
So, der Radhalter ist fertig, zumindest fertig konstruiert

Nach allen Berechnungen, kann dann auch ein Elefant eboarden! Naja wenn das Board halten würde...
Dann hoffe ich mal, das ich die Dinger in den nächsten zwei Wochen fertig kriege
Habt ihr vielleicht noch Anregungen, wie ich die Kabel aus dem Motor kriege, ich hab mir überlegt, in die Achse eine Nut zu fräsen.
Das müsste statisch auch hinhauen, aber vielleicht gibt es ja eine schönere Lösung...
Anbei ein paar Bilder vom Radhalter und eins Mit Rad:
-
Danke, für die geile Antwort! Das sind ja mal handfeste Infos.
Ich bin auch ein wenig weitergekommen. Nächste Woche kommt das Gummi für den Reifen.
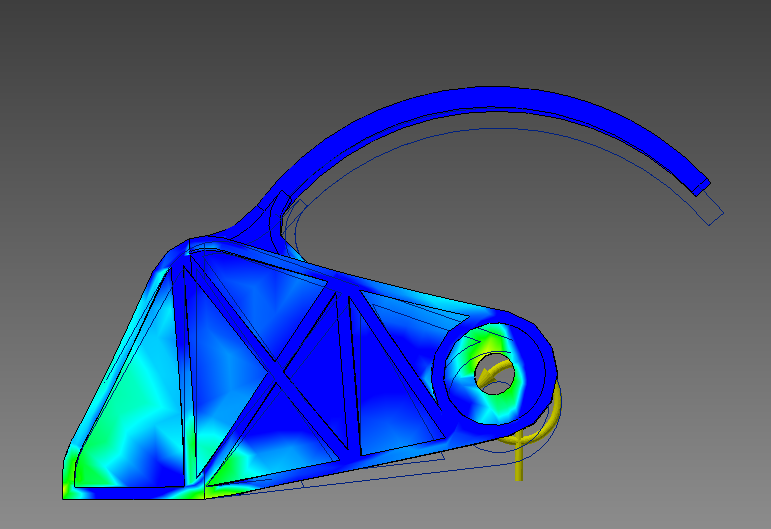
Ich baue erstmal ein Versuchsboard, bei dem die Hinterachse/Rad nicht mitlenkt, um zu schauen, ob der Motor genug Kraft hat.
Hab schonmal erste Belastungsanalysen gemacht, damit das auch so leicht wie möglich wird...
-
Jetzt verstehe ich, dann könnte ich aber dieses BMS nehmen:
http://www.groetech.de/index.php?main_page=product_info&cPath=26&products_id=677
Und es auf die Ober- bzw. Untergrenze der Zellen auslegen lassen, in dem Fall dann 4,1 bis 3V?
Oder habt ihr eine Empfehlung für ein BMS und Akkus mit einer hohen Leistungsdichte die dazu kompatibel sind?
Habe schon BMS, PCB in der Suchfunktion eingegeben, war dort aber nicht so erfolgreich...
-
Für meinen Geschmack passt der weder noch
Li-Ion betreibt man idR zwischen 3V - 4,2V. Die Untergrenze mit 2,5V ist da extrem kritisch, wäre vielleicht bei 2,7V gerade noch erträglich.
LiFePo4 betreibt man zwischen 2,5V - 3,6V. Da ist die Obergrenze schon recht zerstörerisch veranlagt.
Je nach Betriebsbedingungen, Leistung, Akkugröße (Ah), Regelmäßigkeit der Nutzung des Boards können unterschiedliche Akkutypen sinnvoll/günstig/am besten geeignet sein.
Vielen Dank für die ganzen Infos!
Ich hätte gerne einen Akku mit 10 bis 15 Ah und 36V.
Dieser soll möglichst schmal sein, dass er nicht zu sehr aufbaut:
Deswegen habe ich mir als Zelle sowas wie die vorgestellt: http://www.groetech.de/index.php?main_page=product_info&cPath=6&products_id=302
Die würde ich dann als 10S4P zusammenlöten.
An meinem Akku würde ich gerne ein BMS anschließen, sodass man diese, falls möglich,mit einem Laptopladegerät-ähnlichem Ladegerät einfach aufladen kann.
Dabei wäre der Vorteil, dass Ladegerät bedingt durch die geringe Größe und das Gewicht schön portabel wäre.
-
Alles klar. Ich hab den 60 kV leider noch nicht ausprobieren können, da "out of stock". Er ist als Alternative für mich zum Testen gedacht. Aber wenn Du mir den 60kV verkaufen möchtest, kann ich Dir dann gerne sagen, wie er so ist
Leider brauch ich den selber
Ich weis nicht, ob du das gelesen hast, aber ich will den als Nabenmotor für ein etwas größeres Rad nehmen, und fange heute an die Einzelteile zu fertigen.
Aber ich fand die Verarbeitung nicht so geil, aber vielleicht läuft der ja wie Sau, will den noch nicht verurteilen...
-
Kannst Du mir sagen, was Du mit dem Satz ausdrücken möchtest? Englisch is ok too.
Oh, entschuldige, hab das wohl zu schnell reingehämmert, das mir die Autokorrektur ein Schnippchen geschlagen...
Jetzt nochmal auf deutsch:
Ich kann dir leider nicht weiterhelfen, jedoch habe ich auch den 60kV Motor mit 2400 W und würde gern mal hören, was du da so für Erfahrungen mit gemacht hast, bzw. wie er dir so gefallen hat, was Du von der Verarbeitung hältst.
Liebe Grüße
-
Verstehst Du Dich denn selbst?
Wie willst Du parallel geschaltete Zellen denn noch anders balancieren, als es die Parallelschaltung an sich tut?
Beim BMS steht nichts von einstellbarem Spannungsbereich und Du schriebst zwischendurch mal von LiFePo4. Würde so nicht zusammen passen.
Gute Frage
Ich wusste nicht, dass sich parallelgeschaltetete Zellen selbst balancieren, aber jetzt wo du sagst klingt das ja verdammt logisch. Das sind bestimmt Fragen, bei denen jeder der ein bisschen Ahnung von Elektrizität hat beschämt den Kopf schüttelnd wegschaut....
Meinst du, das der BMS nicht zu LiFePo-Akkus passt? Ich glaube solche Akkus wären mir auch zu schwer... Das ich eher zu LiPo tendiere.
-
Moin,
Erstmal ein schönes Wochenende! :peace:
Ich hab mal ne Frage zum BMS:
Ich möchte meinen Akku mit je vier oder fünf Zellen in Paralleschaltung (12-15A) und diese dann in Reihe schalten (36V).
Da ich ein BMS nutzen möchte jetzt die Frage:
Muss ich jede Zelle einzelnd balancieren? Oder kann man einender parallelgeschalteten Zellblöcke balancieren? Ich hoffe ihr versteht mich
Als BMS ist mir bis jetzt das Ding ins Auge gefallen, bin aber gerne für andere Vorschläge offen:
http://www.groetech.de/index.php?main_page=product_info&products_id=578
Liebe Grüße
-
Mit den Laststrom von 15A kann ich den Empfänger versorgen [emoji51]
Mhhh, guter Einwand :thumbsup::thumbsup:
-
Moin Dude,
Ich kann dienender nicht weiterhelfen,Mäher ich besitze den gleichen Motor mit 60 KV, was hast du damit so für Erfahrungen gemacht?
-
Hier ein Link den ich gerade gefunden habe:
Bausatz- Antiblitzschaltung
http://www.groetech.de/index.php?main_page=product_info&cPath=25&products_id=526
-
Open Source klingt natürlich nett, aber wenn ihr die Dinger alleine konzeptionieren, herstellen und anschliessend vertreiben möchtet, dann macht euch das meiner Ansicht nach zu einem Anbieter kommender Radnabenmotoren. Opensource würde z.B bedeuten, dass die Konstruktionspläne allen zugänglich gemacht werden damit wir unseren Senf beizusteuern könnten, wir im Herstellungsprozess freie Auswahl hätten und diese mit dem entsprechenden Maschinenpark sogar selbstständig Fertigen könnten oder das mindestens die Kostentransparenz eurer Seitz offengelegt wird. Eine komplette Achse als Einzelteil über ein Open-Source Projekt zu promoten ist meiner Meinung aber nicht unbedingt angemessen. Das Testen von Prototypen und Einbinden von Kundenrückmeldungen sind ganz normale Steps in jedem Fertigungsprozess. Das Einbinden einer Community für diese Arbeitsschritte, machen ein solches Produkt aber noch lange nicht zu Open Source.
Das sollte euch jetzt aber nicht daran hindern sich voll in das Thema reinzusteigern. Der Markt schreit förmlich nach Radnabenmotoren und es fehlt noch deutlich an Anbietern. Knallt mal noch ein paar Hallsesoren in den Antrieb und lasst uns die Protos auf Herz und Nieren testen.
Ich muss da Exo recht geben, aber an sich ein geiles Projekt!
Vor allem wenn alles ein standarisiert ist, würde das vieles einfacher machen.
Man könnte ja mal einen Thread anstoßen mit dem ultimativem Board, in dem jeder sagt, was für ihn die endgeile Lösung wäre.
Wenn man jetzt nicht beim Motor anfängt sondern bei den Verbindungsstecker ESC zum Motor:
Bananenstecker, oder was wasserdichtes, jedes Kabel einzeln oder alle 3 gleichzeitig.
Wenn man ein bisschen beim open-source-Gedanken festhält würde ich dann denn VESC vorschlagen, dafür könnte man dann fertige Komponenten wie z.B. Nunchuk(Plug und Play) mit Software, oder eine Beleuchtung mit Blinkern und Software(hat Vedder glaube ich schon realisiert) o.ä. rausbringen.
Akkupacks gibt es ja auch schon (Aliendrive, Esk8 ...). Das fände ich aber auch geil. Vielleicht dann als Komplettpaket mit standarisierter Verbindung zum ESC, Powerspark-Switch, BMS/PCB, in verschiedenen Größen wählbar, eventuell dann mit einem leichtem Ladegerät ladbar, das bequem in den Rucksack passt oder ähnlich kompakt wie das von Mellow, dann nimmt man einfach noch eins mit, wenns preislich im Rahmen liegt.
Aber ist denke ich mal ein ganz schön umfangreiches Projekt, bin gespannt.
-
Hier nochmal mal ein Link zum Motor, was hält ihr von diesem, meint ihr der hat genug Dampf?
-
Die Spritzwasserdichte >IP4x Bauweise könnte aber bei der Wärmeabfuhr des Motors einen Nachteil vorweisen. Da es sich beim diesen Modellen aber nicht um einen SK3-Umbau sondern um eine Einzelanfertigung mit 28 Polen handelt, brauchen wir erst ein paar Erfahrungswerte, um diesen Artikel beurteilen zu können.
Habe übrigens noch ein paar Videos gefunden und kann euch am Nachmittag mal zeigen das die Motoren fahrbar sind. Der Typ will damit zwar gleich ne Kickstarter-Kampagne starten, aber das ist erstmal egal.
Hat hier denn schon mal einer diese Achsen ausprobiert? Ich scheue mich eigentlich vor so China Zeug, aber mein Motor ist ja auch nicht besser.
Ich weis nicht was ich davon Halten soll, also dem Kickstart-Projekt. Humina... Hat ja bei Endless-sphere sowas rausgebracht, die Achse gibt es bei Esk8 bald in Deutschland, jacobbloy hat ja auch Motoren/Räder entwickelt und Mellow als ganzer Antrieb ist ja auch geil und fährt sich richtig gut, wasserdicht und Made in Germany...
Ich hab nochmal ne Frage zu den Akkus:
Ich hab dein Leichtgewicht gesehen, geiles Ding!
Was wären die Akkuzellen deiner Wahl?
Hast du einen Tipp beim Vorgehen, wenn man das Pack zusammenlötet?
-
Ich vermute Barney meinte dieses und nicht das Offroad-Model:
http://www.elektro-skateboard.de/forum/szene-talk-63/lofty-ambition-450-750w-hubmotors-5372.php
Die Dinger sind mir auch schon aufgefallen, gefällt mir an sich ganz gut, Vorfällen was mir gefällt ist, dass die im Gegensatz zu den Dingern von Esk8 wasserdicht sind.
Ich traue den Dingern ja nicht, wenn da Luft und Staub und Dreck und Wasser eindringen kann ,könnte ich mir vorstellen, dass die Cu- Isolation kaputt geht.
Aber, normale Achsen mit Hubmotoren gibt es ja schon. Wäre ja Langweilig
Ich will ein Rad hinten, ein bisschen fetter als normal, mit dickem Hubmotor, und auch durch Gewichtsverlagerung lenkbar.
Bin gerade noch dabei das Lenkkonzept auszuarbeiten, dauert alles irgendwie länger als ich dachte...
-
Du begibst dich in eine Zwickmühle. Klar ist es möglich, die Spannung immer weiter zu sengen, damit steigen aber die Ströme entsprechend an. Ziel sollte es sein, ein höhere Spannung anzustreben um den Strom nicht ausufern zu lassen. Wie du mit den Antriebsrechner sicherlich schon bemerkt hast, ist der überproportionale Anstieg der Leistung, in Abhängigkeit der Geschwindigkeit. Ich will damit sagen, wenn du später mit der Geschwindigkeit höher gehst, steigt die Leistung sehr stark an und kann ggf. die Abwärme (Verlustleistung, Wirkungsgrad) nicht mehr ausreichend abführen. Das System überhitzt (siehe Bilder von Dude).
Wie kommst du auf einem KV-Wert von 60? Der ist eher untypisch für die Bauform 6354.
Da dein Antriebsrad recht groß ist, ist ein Stator mit vielen Stator Polen angezeigt. Exo hat gestern auf ein Radantrieb hingewiesen, der nicht 12, sondern 24 Stator Pole. Du willst sicherlich etwas Drehmoment auf dem Rad haben, um aus den Knick zu kommen.
Moin Moin,
Da ich im Moment zu LiFePo-Akkus tendiere, habe ich mich wieder für 10 Zellen, also 33V entschieden. Ich würde dann die Spannung im VESC begrenzen. Ist ja nicht verkehrt, ein bisschen Luft nach oben zu haben.
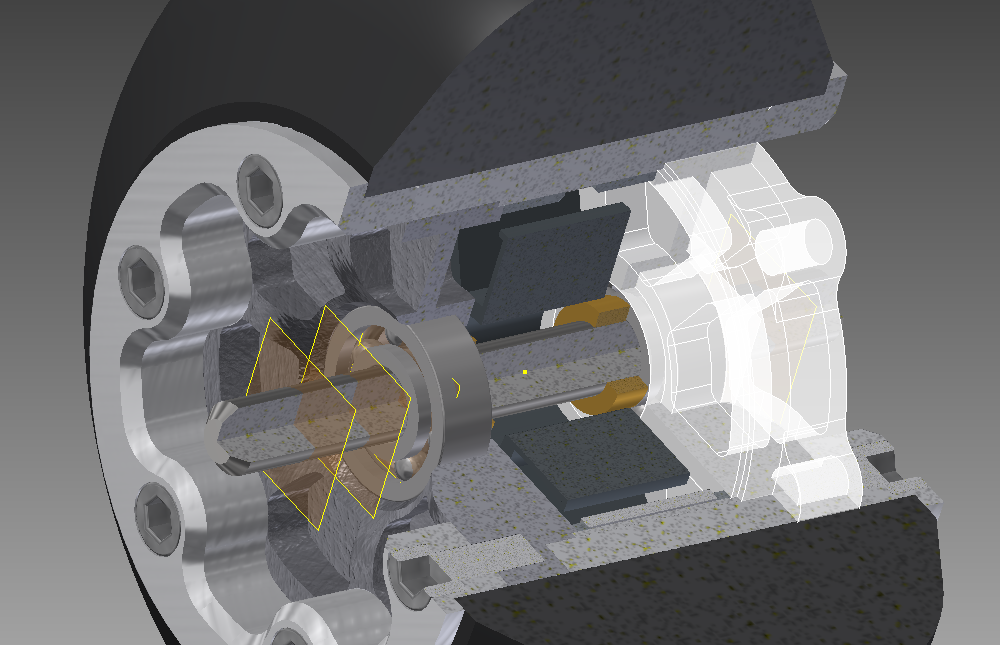
Der Vorstellung wegen, betrachte ich mein Rad mal als Zylinder:
Die Deckflächen bezeichne ich mal als Felgenplatten. Diese fertige ich aus Aluminium, welches ja eine gute Wärmeleitung aufweist. Zudem möchte ich auf der Außenfläche Kühlrippen anbringen, unüm die Wärmeableitung besser zu gewährleisten, aber das wird man sehen, ich denke mal, das muss ich einfach beobachten
Die Daten habe ich von Aliendrive, habe dort die Einzelkomponenten her, da ich keinen deutschen Zulieferer gefunden habe, der mir zugesagt hat, außer Torcman, aber für ein ersten Versuch ein wenig teuer.
Der Motor besteht aus fertiggewickeltem Stator und Rotor mit eingeklebten Magneten. Da die Drahtdicke der Wicklung relativ dünn ist, könnte ich mir das vorstellen, aber da fehlen mir die Erfahrungswerte.
Den Außendurchmesser habe ich von 150 auf 125 mm gesenkt, da ich dafür eine Radbandage verwende .
Der Motor von Exo ist mir auch schon ins Auge gefallen, geiles Teil!
Da ich aber ein Longboard bauen möchte und die Proportionen passen sollen, wäre der Glaube ich ein bisschen mächtig. Ich denke mal, wenn das jetzt alles so funzt wie ich mir das vorstelle, dass ich dann nochmal einen ordentlichen Motor zulege.
-
Und noch eine Frage zum BMS, kann ich auch ein BMS für 10 Zellen mit 6 betreíben, sodass ich später noch die Möglichkeit habe die Akkus aufzustocken?
-
Erstmal vielen Dank für die schnelle Antwort und eine tiefe Verneigung für dein Schaffen!
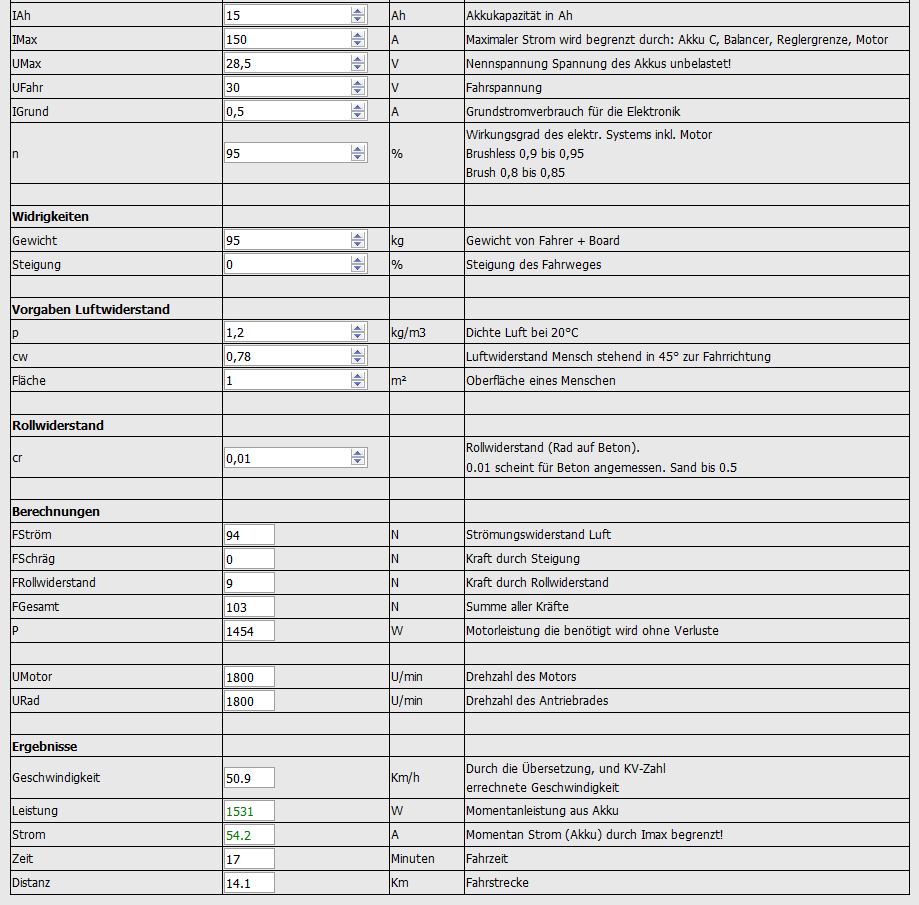
"Antriebsrechner:
Ufar sollte nicht über UNenn liegen, was auch nicht geht, oder nur beim Rekupieren.
Zum Thema Geschwindigkeit. Ich kann dir von 50Km/h nur abraten, Rechne dein System eher auf 30Km/h, will einer schneller werden, dann kann er die Anzahl der Akkus immer noch erhöhen. Zumal versuche mal bei einem Wirkungsgrad von (realistischeren) 90% - also 10% Verlust, 150W über die Achse los zu werden. Der Motor ist nahezu Thermisch isoliert (Reifen) und kann sich fast nur über die Achse kühlen. "
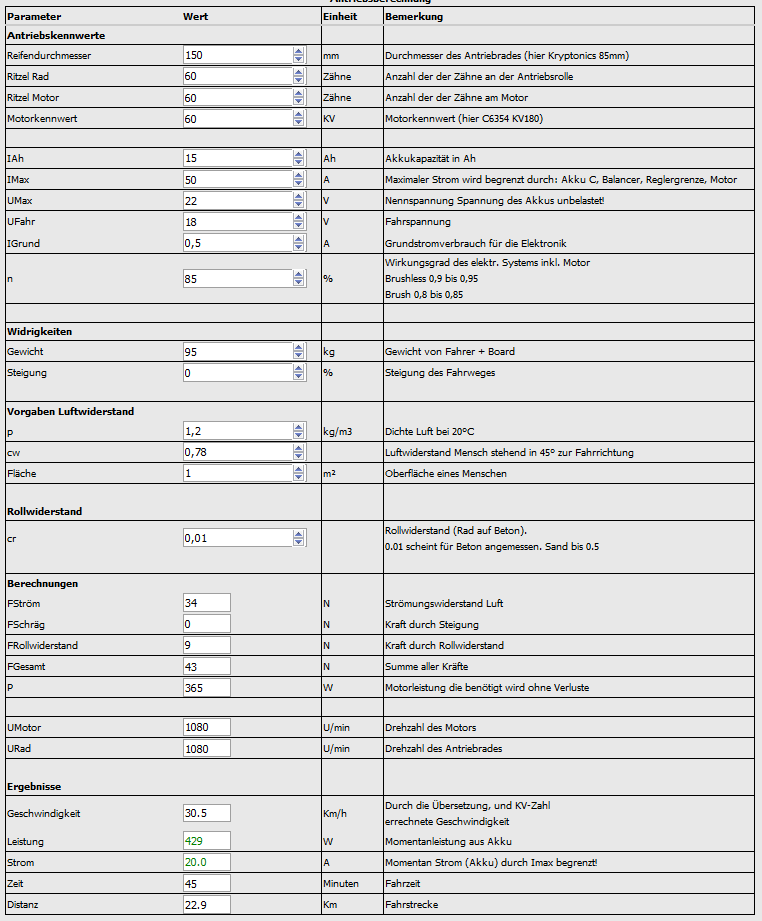
So, ich gehe jetzt mal von 6S aus, mit 22V
Und einer Fahrspannung von 18V, als Verlustfaktor habe ich 15% (85%) angegeben. Siehe Fotos.
Wie meinst du das mit den 150W über die Achse, und ich verbinde den Reifen über Aluminiumplatten mit den Lagern, evtl. gute Kühlkörper?
Meinst du, das 6S für den Anfang reichen?
-
Moin, Moin
Ich bin jetzt soweit, dass ich am Wochenende anfange die Einzelteile zu drehen/fräsen.
Ich habe als Motor:
Aliendrive 6354
Außendurchmesser: 63mm
Kv: 60
Leistung: 2400W
Max. Stromaufnahme: 85A
Der Raddurchmesser des Rades, das ich jetzt fertige wird 150mm im Durchmesser haben, da ich als Reifen eine Radbandage nehme, die 150mm im Außendurchmesser aufweist.
Leider bin ich was die elektrotechnischen Aspekte angeht, ein bisschen überfragt und widme mich hiermit an die Forengurus wie Barney und Co;)
Ich möchte einen Akku mit 10S und +- 15Ah verwenden. Ich gehe in meiner Unwissenheit davon aus, dass eine Dauerentladerate von min 50A und einem kurzzeitiger Entladestrom von max. 150 A ausreichen. Diesen würde ich gerne mit einer Schutzschaltung und einem BMS versehen, sodass ich einfach ein Netzteil anschließe und Laden kann.
Als Anhang habe ich mal eingefügt, was der Reichweite-Rechner ausgespuckt hat, ich hoffe ich habe ihn korrekt benutzt.
Vom Aufbau habe ich mir das so gedacht:
1. Akku
2. Schutzschaltung und BMS
3. Powersparkswitch (falls dieser dann noch benötigt wird)
4. VESC
5. Motor
Als Akkuzellen wollte ich bis jetzt LiMn-Zellen verwenden, da diese stabiler sein sollen als LiPo/LiIon und zudem mehr Ladezyklen mitmachen, doch ich lasse mich gern etwas besserem belehren.
Ich hätte mal gerne eure Einschätzung dazu, macht es eurer Meinung nach Sinn, die Akkus im Board zu balancieren. Von vielen hab ich auch gelesen, das sie aufgrund der geringen Ladungsunterschiede der Zellen nach Benutzung, darauf verzichten. Ich fände das interessant, da der Akku fast die Hälfte der Komponentenkosten ausmacht...
Liebe Grüße
-
Min Exo,
Sieht geil aus, du scheinst die Sache echt richtig vernünftig anzugehen.
Ich weis nicht ob du das gelesen hast, aber ich möchte ein Longboard bauen, dass hinten ein Fettes angetriebenes Rad hat, welches auch mitlenkt.
Wie siehts mit deinen Motoren aus? So vom ersten Eindruck fände ich würden die sich echt gut an meinem Brett machen, meinst du einer würde ausreichen, um auf der Straße genug Power zu bringen? So dass Mann schöne drifts ziehen kann:peace:
Spaß
Wäre aber schön, von dir zu hören!
Liebe Grüße
-
Moin Beatbuzzer,
Die Dinger kenne ich auch noch von früher, bei uns hießen die Kickboards...
Beim Longboard habe ich die Vorderachse auch immer etwas weicher eingestellt, aber ich habe das Bedenken, dass der Lenkradius dann ein bisschen zu groß wird.
Zudem könnte ich mir vorstellen, dass das Brett bei höheren Geschwindigkeiten anfängt zu wobbeln, wenn die Vorderachse zu weich eingestellt wird.
Deswegen fände ich es cool, wenn die Hinterachse ein wenig mitlenkt...
-
Hat jeman deine Idee wie man die Kippbewegung des Boards bei Gewichstsverlagerung in eine Drehbewegung des Rades umwandeln kann?
Die Fahrtrichtung ist Links.
-
Moinmoin,
ich hab mich schon vorgestellt, bin neu hier.
Ich komme aus Stralsund und hab hier noch nicht viele Boarder kennengelernt.
Ich hab früher mal einen Kettensägenmotor an ein Board gebastelt, war aber nicht so zufrieden damit.
Das war laut und dreckig :devil:
Dann kam ich irgendwann darauf, das ein Elektromotor perfekt sei, und irgendwann hab ich das Mellow board gesehen und habe mich verliebt...
Leider nicht unbedingt günstig.
Da man bei 2 Hubmotoren meines Wissens nach auch 2 ESCs (150$) benötigt habe ich mir überlegt, ein Board zu bauen mit einem Hinterrad, da ich es auch nicht so schön finde, wenn nur ein Rad angetrieben ist (Symetrie und so...)
Das Hinterrad soll sich mittig zur Längsachse des Boards befinden und auch über Gewichtsverlagerung lenkbar sein. Es könnte senkrecht zum Auflagerpunkt axial gelagert sein, sodass eine Lenkbewegung möglich ist, und dann über ein Federelement o.ä. mit dem Brett verbunden sein, dass die Gewichtsverlagerung eine Lengbewegung ausübt.
Leider geht das über meine Grundkenntnisse in Cad hinaus...
Was haltet ihr erstmal von der Idee?
Ps: Ich hätte auch zuhause ne CNC Fräse und Drehmaschine, also könnte ich alle Prototypen selbst fertigen, mir fehlt es halt ein bissl bei den Grundlagen in der Konstruktion.
Ich hab vorraussichtlich ein erstes Modell mit Free-Cad in ein bis zwei Wochen fertig, aber nicht so wie es mir gefallen würde.
Ich würde gerne Free-Cad nutzern um wie Vedder das allen zugänglich zu machen!
Grüße
-
Moinmoin,
Ich bin neu hier und wollte mich mal vorstellen.
Ich komme aus Paderborn und bin nun in Stralsund und studiere hier Wirtschaftsingenieurwesen.
Das Thema E-Board ist immer präsenter und da konnte ich einfach nicht nichts tun.
:peace:
Es gibt meiner Meinung nach nichts geileres als Hubmotoren und es ist geil, dass sich da so viel tut in letzter Zeit!
Ich möchte gern ein E-Board bauen mit einem lenkbarem Hinterrad und Hubmotor, werde dazu aber nochmal ein Thread aufmachen.
Liebe Grüße




3-rädriges Eboard
in Elektro-Skateboard Werkstatt
Geschrieben
moinmoin,
Solangsam nimmt alles Gestalt an, zumindest in meinem Kopf
Hat einer von euch Stecker verwendet?
Ich möchte den Vesc und die Akkus mit dem BMS jeweils einzelnd in einem Wasserdichtem Gehäuse unterbringen und bin jetzt auf der Suche nach wasserdichten Steckern (IP67 o.ä.), die sich einfach trennen lassen, 2 mal mit 2 Polen, vom Akkugehäuse zum Vesc und einmal vom Vesc zum Motor.
Hat einer von euch sowas schonmal verbaut, oder habt ihr einen Stecker vor Augen?
Liebe Grüße