MartinOlszowski
-
Gesamte Inhalte
11 -
Benutzer seit
-
Letzter Besuch
MartinOlszowski's Achievements
")
Newbie (1/14)
0
Reputation in der Community
-

anfänger Probleme mit Flipsky brauche Hilfe #DULLI
MartinOlszowski antwortete auf MartinOlszowski's Thema in: Eigenbauten
yeeeeeesss!!! Problem ist gelöst! die Motoren haben zwar im stand Probleme mit dem start aber kommen danach super klar Danke nic-lobo und allen die mir weitergeholfen haben!!! 😄 -
anfänger Probleme mit Flipsky brauche Hilfe #DULLI
MartinOlszowski antwortete auf MartinOlszowski's Thema in: Eigenbauten
Wie schalte ich diese denn in reihe? war ja mein plan n 12s zu haben -
anfänger Probleme mit Flipsky brauche Hilfe #DULLI
MartinOlszowski antwortete auf MartinOlszowski's Thema in: Eigenbauten
Flipsky hat sich das Problem angeschaut. also.. Nachdem ich ein neues VESC von Flipsky zugeschickt bekommen habe und es ohne Sensoren jetzt funktioniert sehe ich das es kaum Power hat.. da stellt sich nach meinen Berechnungen die frage wie ich mein Drehmoment bekomme das ich brauche Berechnet habe ich 120Nm die ich aufbringen muss um vom fleck zu kommen, aber wie verhält sich das auf die Motoren? Bei meinen Flipsky Motoren steht das die nur 9Nm aufbringen muss ich die ähnlich wie bei der KV Rate mit der Volt anzahl multiplizieren oder mit der Zahnriemenübersetzung verrechnen? Wie kann ich das verstehen? Was ich natürlich schon bemerkt habe ist das 190KV was die U/Min angeht natürlich zu viel ist und in meinem Fall 140KV top wären Ich hab da die gefunden APS 63100 Outrunner brushless motor 140KV 4500W ALIENPOWERSYSTEM.COM APS 63100 Outrunner brushless motor 140KV 4500W könnt ihr die empfehlen oder hat jmd mit denen schon Erfahrungen gesammelt? -
anfänger Probleme mit Flipsky brauche Hilfe #DULLI
MartinOlszowski antwortete auf MartinOlszowski's Thema in: Eigenbauten
Kann man die Verkabelung der Akkus iwie überprüfen? Welche Einstellungen meinst du und wie finde ich diese? -
anfänger Probleme mit Flipsky brauche Hilfe #DULLI
MartinOlszowski antwortete auf MartinOlszowski's Thema in: Eigenbauten
Kann ich ja nicht.. da die Motoren sich nicht bei Last drehen wollen und diese ohne Last so schwach sind das ich die mit der Hand stoppen kann. Wäre gerne schon gefahren aber es ist ja nicht möglich weswegen ich ja hier bin. Ich hab Flipsky zwar kontaktiert aber es scheint als ob sie auch nicht weiter wüssten... -
MartinOlszowski hat das Profilbild geändert
-
anfänger Probleme mit Flipsky brauche Hilfe #DULLI
MartinOlszowski antwortete auf MartinOlszowski's Thema in: Eigenbauten
Wie kriege ich das in den Griff? -
anfänger Probleme mit Flipsky brauche Hilfe #DULLI
MartinOlszowski antwortete auf MartinOlszowski's Thema in: Eigenbauten
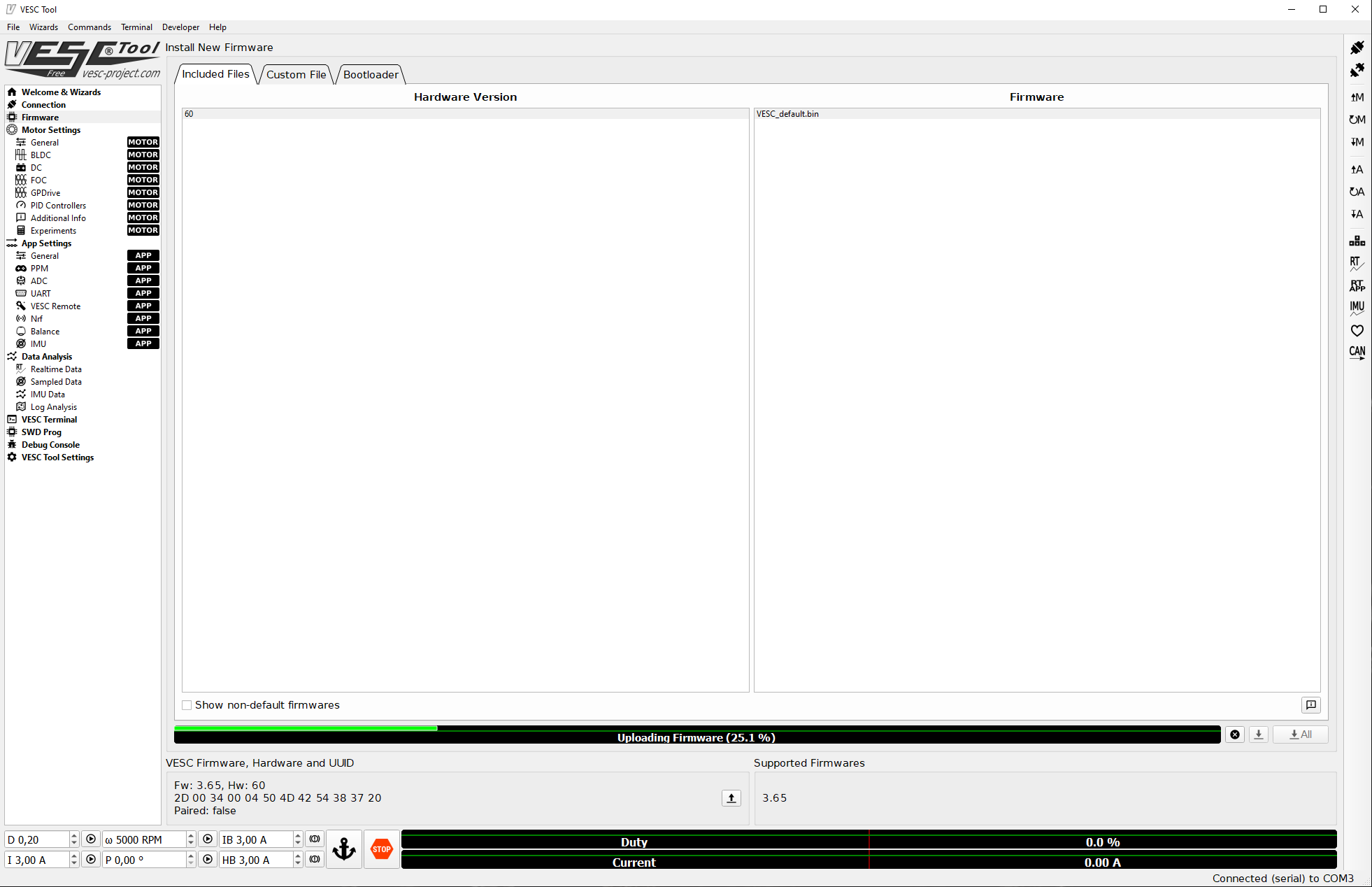
Bei dem VESC muss ich, wie ich verstanden habe, nicht beide einzeln updaten, sondern nur Eins mit dem "All" Button. Die CAN BUS conection verbindet diese doch oder? Aktuelle Firmware ist 3.65 Bei Vollgas.. also bei der Fernsteuerung schnellste Stufe (rot) und Anschlag. -
anfänger Probleme mit Flipsky brauche Hilfe #DULLI
MartinOlszowski antwortete auf MartinOlszowski's Thema in: Eigenbauten
Kleines Update: Das ganze noch einmal ausprobiert, nur das ich das ich den UART Stecker erst nach der Programierung eingestöpselt habe. Immer noch ohne Riemen aber jetzt laufen beide irgendwie.. Der auf der Master Seite (VESC1) langsam und nicht immer.. also braucht manchmal einen kleinen ruck Der auf der CAN-Bus Seite (VESC2) genauso nur schnell. Was kann das bedeuten? -
anfänger Probleme mit Flipsky brauche Hilfe #DULLI
MartinOlszowski antwortete auf MartinOlszowski's Thema in: Eigenbauten
Gemacht aber leider immer noch gleiches verhalten... -
anfänger Probleme mit Flipsky brauche Hilfe #DULLI
MartinOlszowski antwortete auf MartinOlszowski's Thema in: Eigenbauten
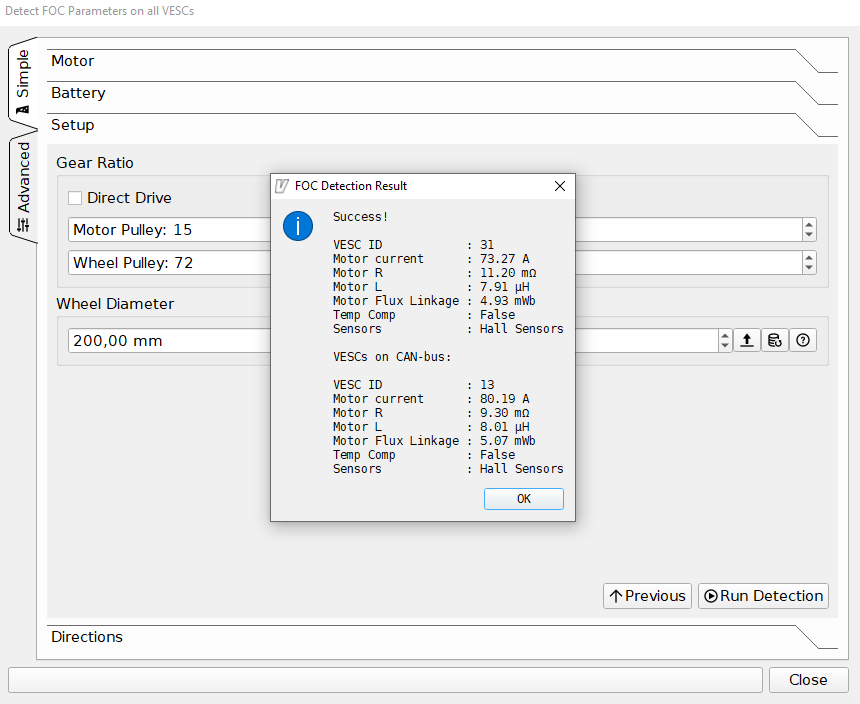
Jap ohne sensoren ausprobiert aber das selbe problem bleibt.. Wärend der run detection laufen die ohne probleme. Nur später in der Richtungsauswahl fangen die an zu stocken. -
anfänger Probleme mit Flipsky brauche Hilfe #DULLI
MartinOlszowski hat ein Thema erstellt in: Eigenbauten
Hi bin neu hier und brauche hilfe.. Mein Setup: Anti spark Switch Smart Enhanced 200A for Electric Skateboard /Ebike/ Scooter/Robots × 1 Dual FSESC6.6 Based upon VESC6 with Aluminum Heatsink × 1 2.4Ghz Remote VX1 for DIY electric skateboard × 1 For VESC6 BLDC Belt Motor 6384 190KV 4000W for Electric Skateboard × 2 10MM / Without Pulley Turnigy High Capacity 12000mAh 6S 12C Lipo Pack w/XT90 Übersetzung ist Motor pulley 15 , Wheel pulley 72 und Räder 200mm mein Problem ist das sich nach der Programmierung die Motoren nicht drehen wollen und komisch stocken. Hab es jetzt schon mehrere Male ausprobiert und manchmal funktioniert mal das eine oder das andere Rad, langsam oder schnell. Nachdem ich aber alles aus- und wieder an-schalte stocken diese wieder.. was mich auch noch wundert ist das ich relativ oft ein firmware update machen muss. Die Bilder im Anhang sind vom letzten Versuch dazu ein kleines Video vom Setup. Hoffe mir kann wer helfen oder es mir erklären was falsch ist. Bin oft aud Discord MonsterJuiceBox#0603 heiße ich.. einfach anscreiben wäre super da email nicht so mein ding ist ^^' Ich wünsche noch n guten Rutsch und liebe Grüße Martin Olszowski 20191218_175416_Trim.mp4