barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von barney
-
He Dude, für die Drehzahl Bestimmung könnte ein Teensy Counter verwendet werden. Ich sehe mal nach wo und wie man diesen programmiert. 10 mal die Sekunde eine Drehzahl sollte reichen. Vielleicht sollte die Geschwindigkeit durch einen Mouse Sensor bestimmt werden. Bremsen ohne Taste: Da sollte ein anderer Wert einstellbar sein. Z.B. nur 20% anstatt 100%. Das ist leicht zu programmieren.
-
Pflege des Lagers reicht meist. Ich mache diese aussen sauber und dann etwas Öl drauf. Dann laufen meine Lager wieder sauber und geräuscharm.
-
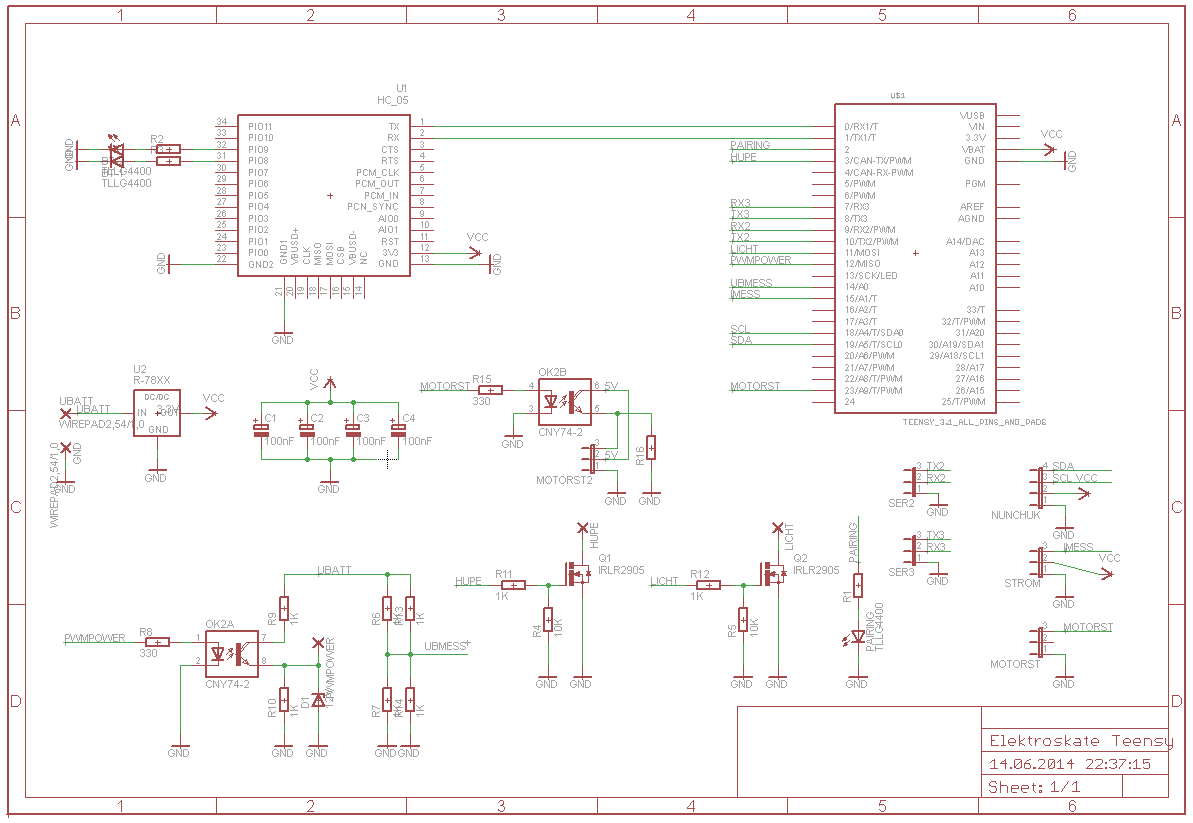
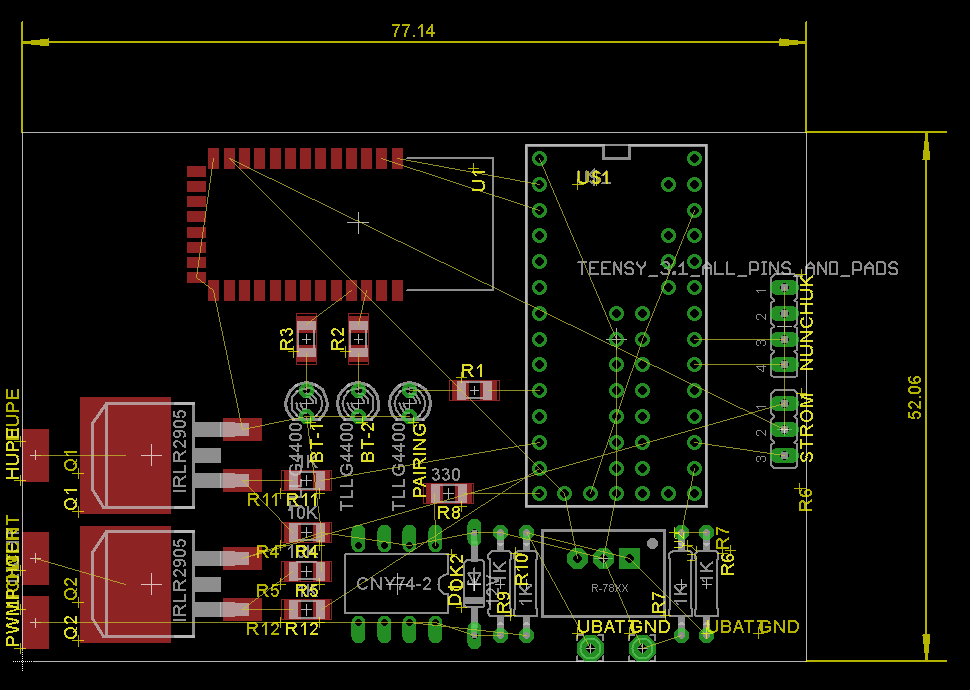
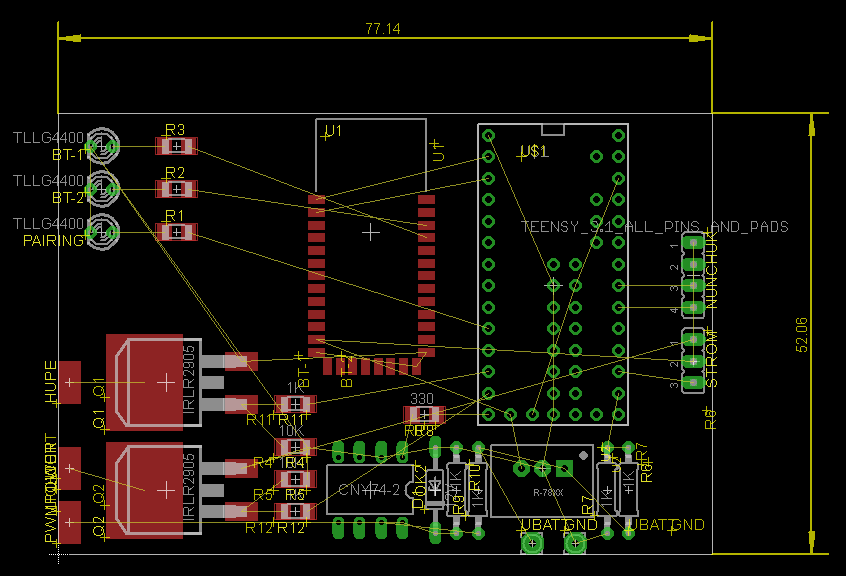
Hi Dude, hat länger gedauert, da mich Eagle verärgert hat und die Berliner SkatebyNight zu verlockend war. Ich muss noch die Bauteilgröße testen und die Raster, dann kann das Layouten (Routen) beginnen. Eine Leiterplatte soll laut Rechner 12,-€ /Stück bei 5 Stück + Porto * MwSt kosten. VG Barney Elektroskate Teensy.zip
-
Hi Dude, Eagle File: Bekommst du heute Abend. ich muss noch den Teensy Typ austauschen, da wir die unteren Kontakte nicht verwenden. Auch Vcc und GND muss ich am Teensy durchgehen. Ich bin mir mit AGND usw. nicht sicher, ob ich das besser auftrenne. Leiterplatte: Da Sonni, Chrizz, Du und ich eine benötigen, wäre es günstiger diese bei einem Leiterplatten Service herstellen zu lassen. Ob ich eine abnehme oder drei verändert nicht den Preis. Eine Kalkulation liefere ich heute Abend. Oder prüfe selbst die Kosten -> http://www.multi-circuit-boards.eu/preise/leiterplatten.html (Zweiseitig, Bestückungsdruck oben) Hier habe ich auch die Layoutvorgaben für Eagle heruntergeladen und Importiert. Leiterbahnbreiten: Im PCB-Modul und Bearbeitet -> Netzklassen habe ich nicht nur Default sondern drei weitere Leiterbahnbreiten definiert. Diese dann den Netzen Vcc, GND, Licht und Hupe zugewiesen. Eagle routet dann entsprechend den Vorgaben. Routingraster 2.5mil! Netzklasse Default 12mil
-
Hi Dude, dein BT -Modul befindet sich auf einer Trägerplatine. Zum Basteln ist das doch sehr gut! Ich verwende BT Bausteine, die man auflöten muss. Für Tests kannst du es doch weiter verwenden.
-
Um den Teensy gegenüber den ESC galvanisch zu trennen. Wenn man bei der Masse misst baut, geht nachher der Teensy kaputt.
-
Ich wollte schon immer mal D2P verarbeiten. Ja, da sind Lötpunkte an der Seite Zum Filtern der Versorgungsspannung. HF Unterdrückung Als Möglichkeit verschiedene Widerstände so kombinieren zu können, damit der ideale Wert eingestellt werden kann. Und der eine R kann durch einen C ersetzt werden, um die Messung von Störsignalen zu schützen.
-
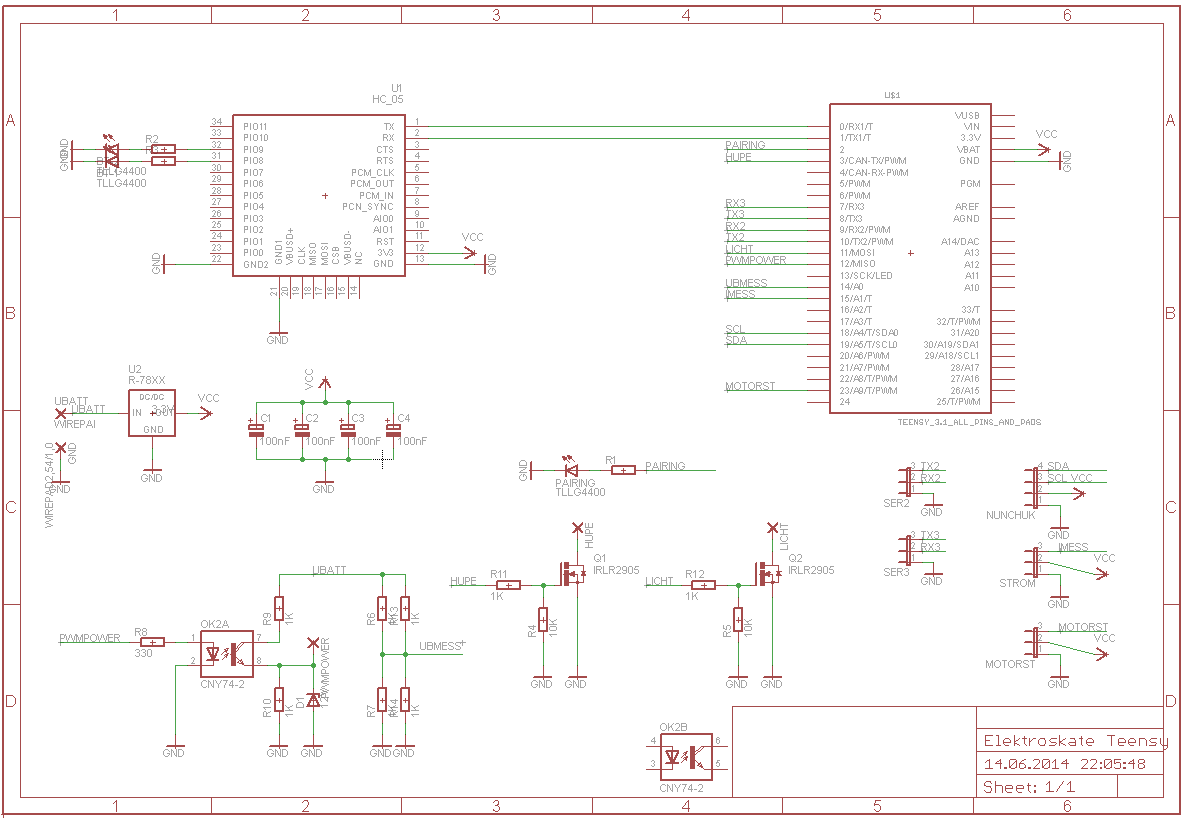
Jetzt mit Optokoppler und 5V Möglichkeit. (aus BEC)

-
Hi Dude, für diejenigen, die einen ESC verwenden, der nicht mit Optokoppler ist, soll ein Optokoppler mit auf die Platine? Einen zweiten Anschluss und Ausgang habe ich noch am Optokoppler frei. Die Platine ist noch nicht optimiert! VG Barney
-
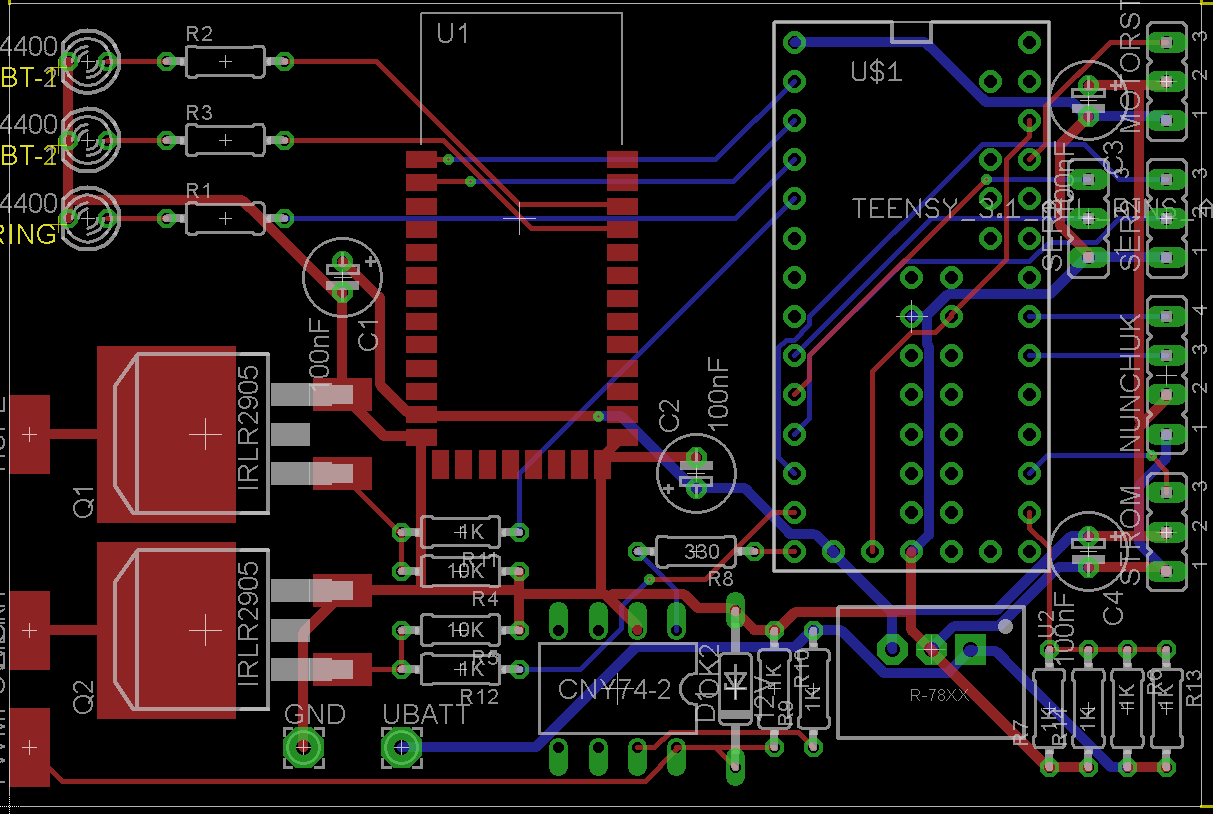
Hi Dude, jetzt auch mit Kondensatoren, keine SMDs und Anschluss für die Motorsteuerung. Ach noch eine kleine Anmerkung: Ich musste einige Pins verschieben, da ich die beiden Seriellen Schnittstellen für ein anderes Projekt benötige.
-
http://m.conrad.de/ce/de/product/811810/Loetstation-analog-95-W-Weller-WS-81-150-bis-450-C Ich meinte solch eine Station. O.k. SMD fliegt raus. Aber die MOSFETs bleiben so!
-
Lieber keine SMD Bauteile?
-
Wie du hast keine Weller Lötstation mit austauschbaren Lötspitzen?
-
Ich hatte auch etwas vermisst. Aber wer will schon Motoren steuern.....
-
Erstes Placement Offen für die Diskussion.
-
Und ich habe mich schon gewundert was du für einen Aufwand mit den Tabs machst.
-
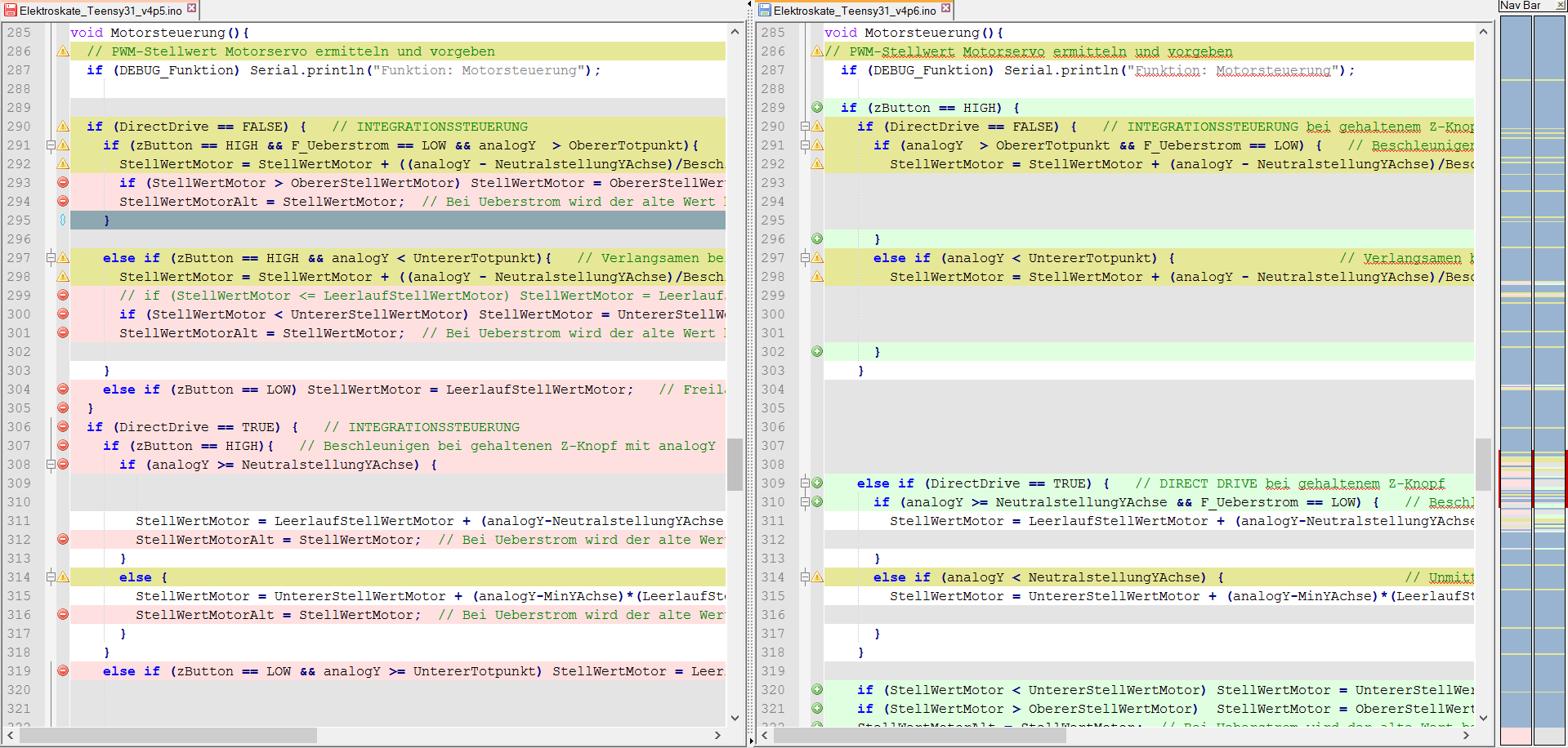
Hi Dude, danke für die Überarbeitung und Optimierung. Da werden sich die 72MHz freuen:D Eine kleine Anmerkung: Bitte keine Tabs verwenden, damit kommt die Arduino IDE nicht immer zurecht. Was du da so mühselig einrückst ist nachher bei mir völlig durcheinander. Ich habe mal ein Diff von unseren Versionen hinein gepackt. Natürlich nur die Motorsteuerung! Für diesen Vergleiche benutze ich Notepad++ mit Compare Plugin. VG Barney
-
if (zButton == LOW && analogY < UntererTotpunkt){ // Unmittelbares Abbremsen bei losgelassenem Z-Knopf StellWertMotor = UntererStellWertMotor + (analogY-MinYAchse)*(LeerlaufStellWertMotor-UntererStellWertMotor)/(NeutralstellungYAchse-MinYAchse); if (StellWertMotor >= LeerlaufStellWertMotor) StellWertMotor = LeerlaufStellWertMotor; // Sicherheitsfunktion gegen beschleunigen if (StellWertMotor < UntererStellWertMotor) StellWertMotor = UntererStellWertMotor; // untere Grenze fuer den Motorregler } Dieser Code kommt zweimal vor. Da Direct Drive und die Integrationssteuerung den selben Code verwendet wird dieser zukünftig zentral stehen.
-
Hi, derzeit erstelle ich unter Eagle ein Layout, die eine Platine oder einen Schaltplan zur Folge hat. Schlussendlich will ich mir eine "echte" Platine fertigen lassen, damit der Kram nicht wild herumfliegt. Den Schaltplan stelle ich in der ersten Version am Wochenende ins Forum. Wer Fehler findet oder Anmerkungen hat, kann mir diese gerne aufzeigen. VG Barney
-
Hi Dude, danke für den Hinweis. Irgendwann wird man Code Blind. Integrationssteuerung: Das letzte "if" könnte auch ein "else if" sein. Ich war scheinbar der Meinung, dass Bremsen vor Beschleunigung sein muss. Im Prinzip nicht falsch, aber beim Abarbeiten der Routine etwas übertrieben. Direct Drive: if (analogY >= NeutralstellungYAchse) { sollte eher ein if (analogY >= NeutralstellungYAchse && F_Ueberstrom == LOW) { sein. Da ich wegen der Überstromerkennung und Trennung der Parameter soviel daran herumgefummelt habe, setze ich mich mal am Wochenende hin und gehe die Motorsteuerungs Routine in Ruhe nochmal durch. Leider habe ich mein Testboard nicht zur Hand. Ich muss mal an dieser Stelle improvisieren. Es zeigt sich immer wieder, Software sollte nicht nur von einer Person geschrieben werden, es sollte mindestens ein zweiter die Zeilen durchgehen. Wie findest du die Trennung der Parameter in eigene Files? VG Barney
-
Und der Optokoppler benötigt einen 10k Widerstand zur UBatt-Seite! Sonst geht er drauf!
-
Auf die Schnelle einen kleinen Hinweis: Der Spannungsteiler für A0 (Spannungsmessung) ist noch auf 30V -> 5V ausgelegt. Da der Teensy 3.1 nur 3.3V verträgt, sollte hier ein anderes Verhältnis eingestellt werden! (R1+R2)/R2 für die Auslegung!
-
Hi Dude, manchmal stehe ich auf dem Schlauch: Ich habe ein Testboard mit zwei Potis. Damit kann ich jeden "Strom" einstellen und damit die Routinen testen VG Barney
-
DS1280 -> DS1820 ! Wie soll ich es sagen? 1. Wenn Du nur steuern willst und keine Telemetrie benötigst, brauchst du nur den Teensy und den R-78 3.3-0.5. 2. Willst Du dein Board (Leistungsteil) über den Teensy einschalten, dann IRFP3206 und den Optokoppler. 3. Benötigst du telemetrische Daten, dann BT-Modul, DS1820, ACS756-050, u.s.w. VG Barney