barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
2 Benutzer folgen diesem Benutzer

Letzte Besucher des Profils
10.656 Profilaufrufe





barney's Achievements
")





-
Dann wird eine Zellengruppe in Unterspannung gegangen sein. Bei solchen Fällen musste ich ans Akku, die Zellengruppen ausmessen und die Gruppe mit Unterspannung mittels Labornetzgerät vorsichtig aufladen. Wenn die Spannung dann wieder hoch genug war, konnte das mitgelieferte Ladegerät verwendet werden.
-
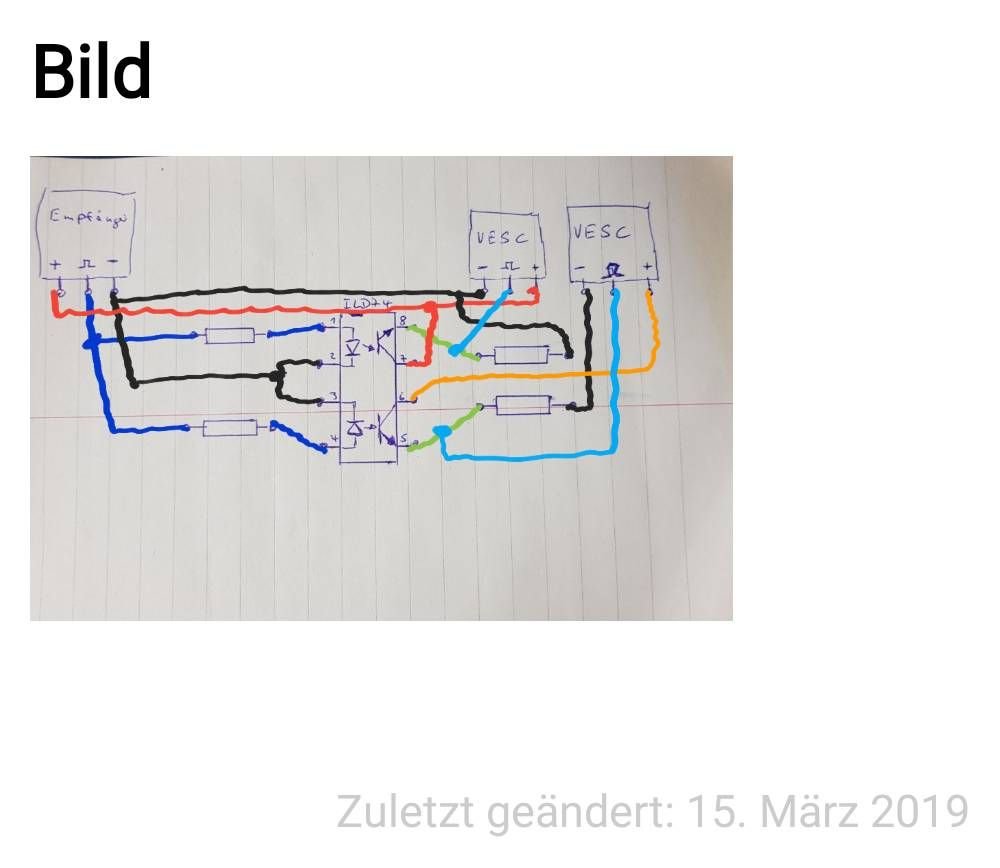
Ja, Potentialtrennung ist Angezeigt, daher die Optokoppler. Ja, Potentialtrennung ist Angezeigt, daher die Optokoppler.

-
330 Ohm gehen fast immer.
-
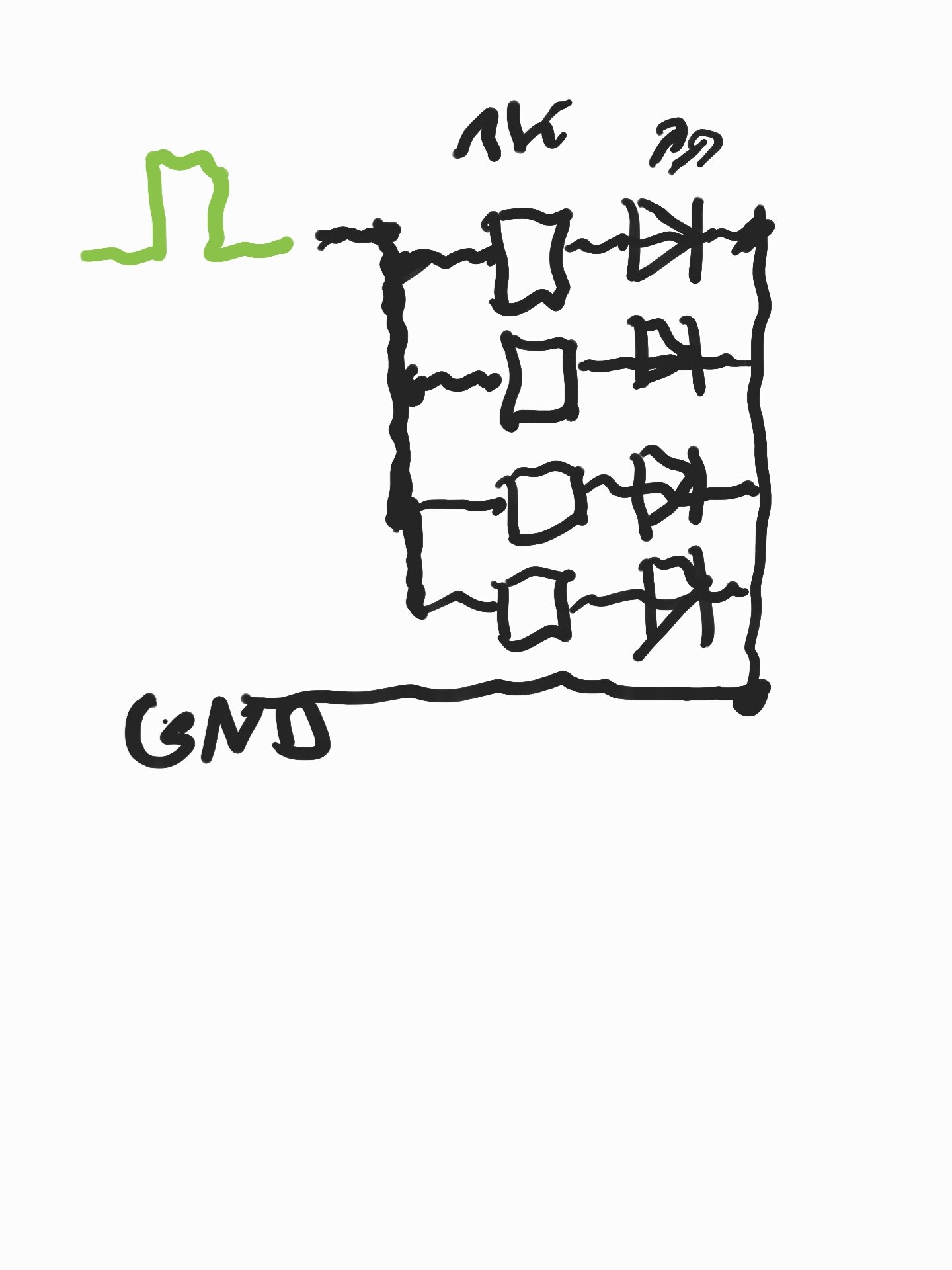
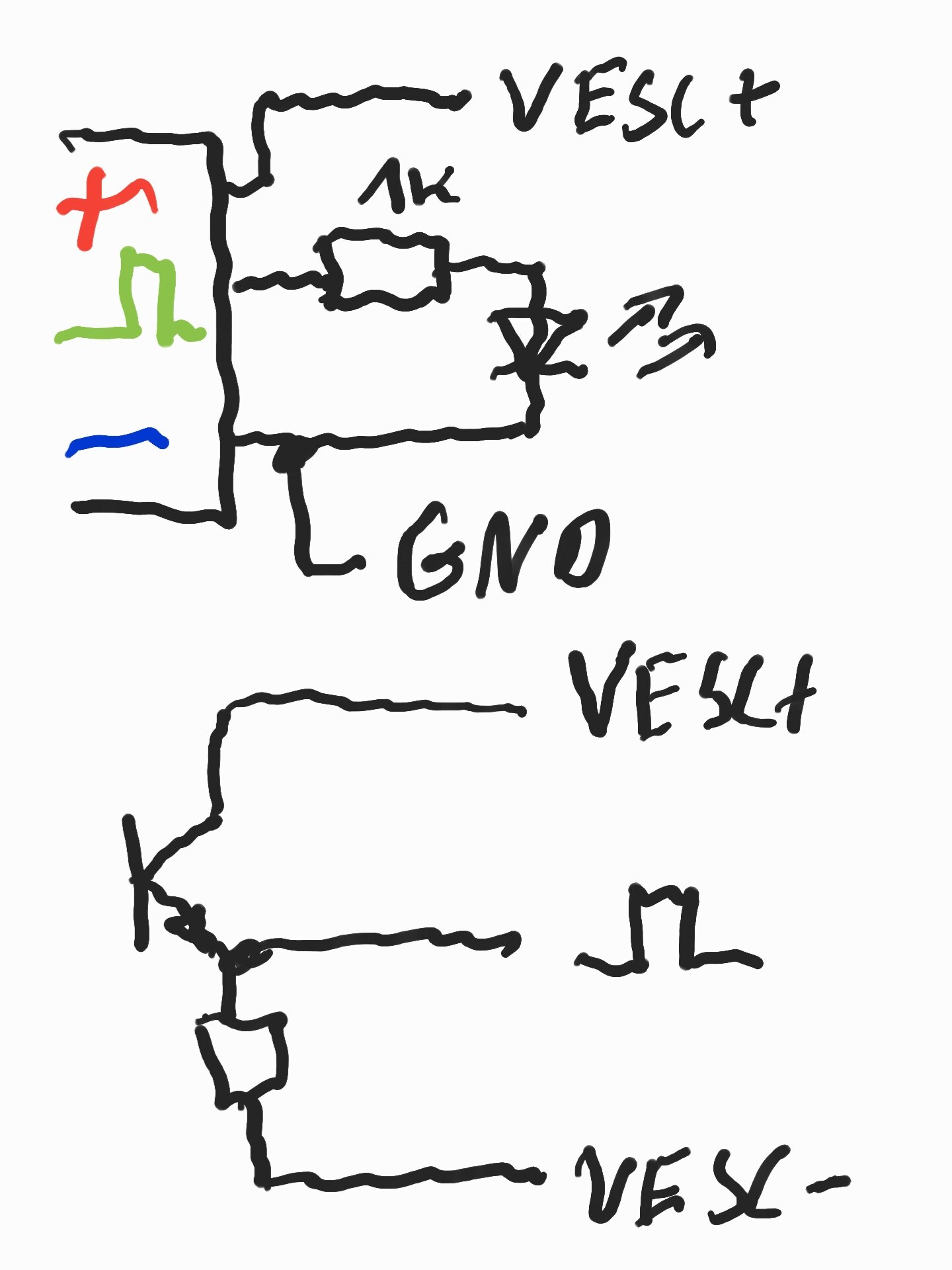
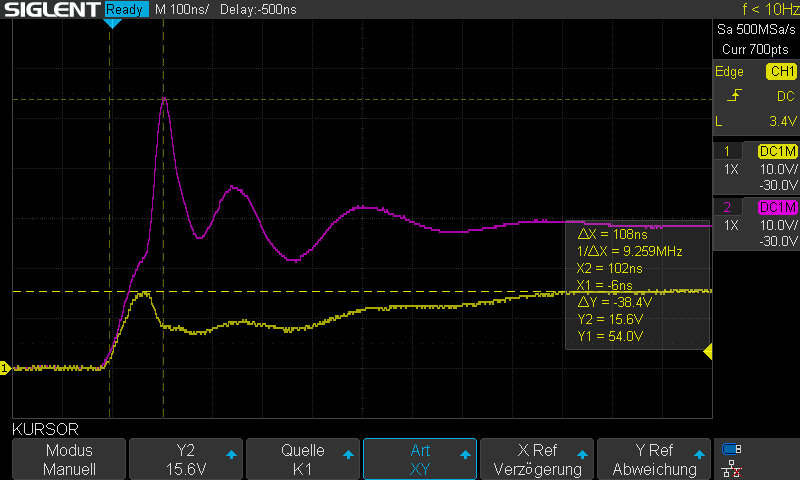
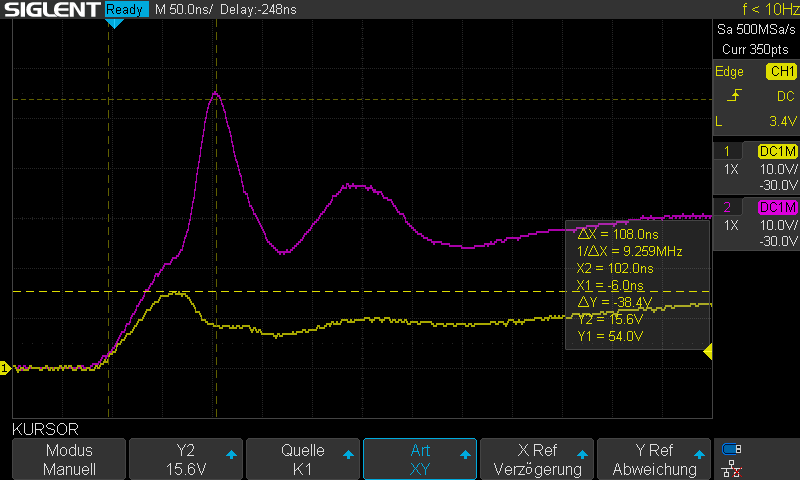
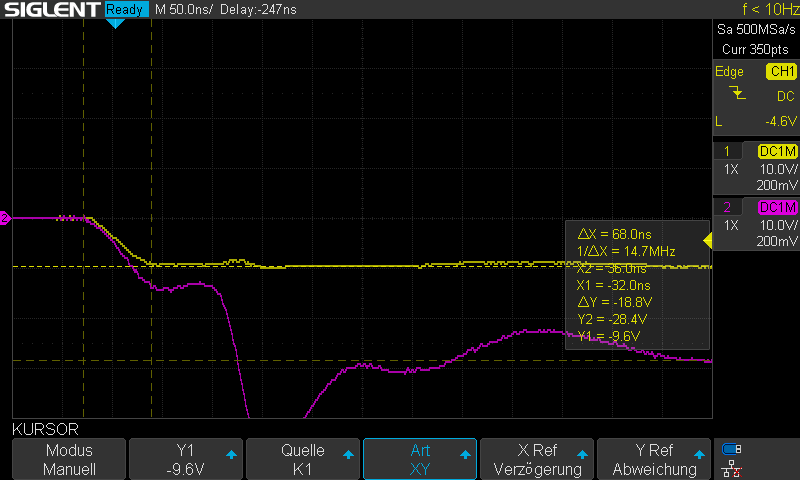
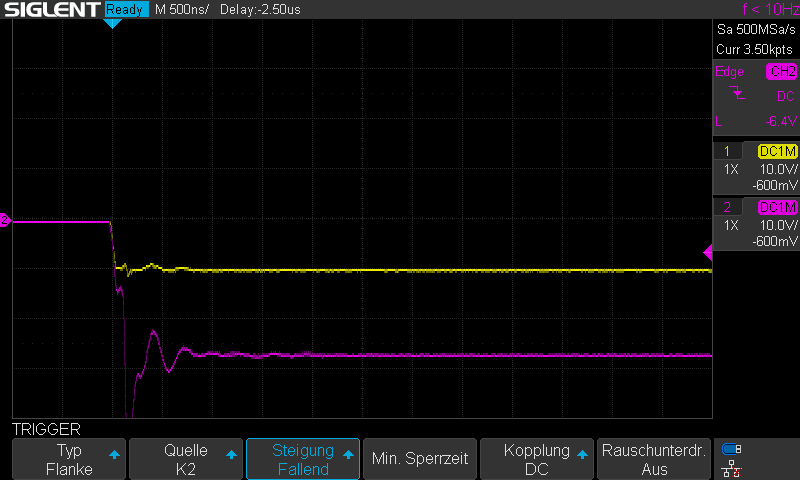
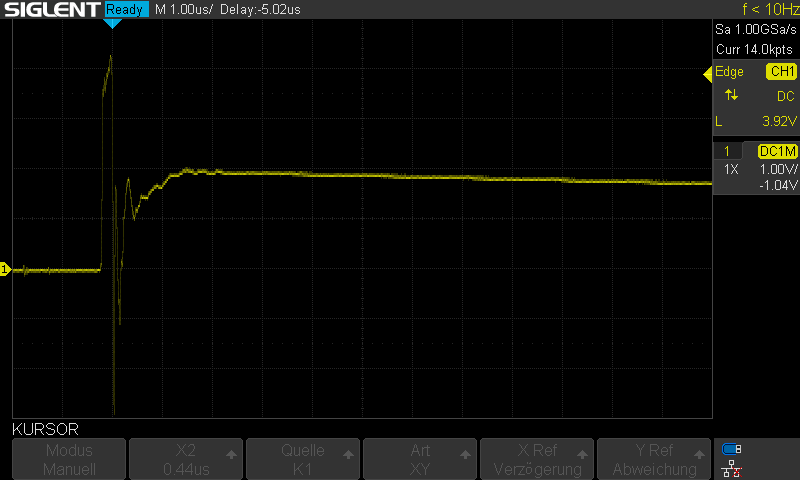
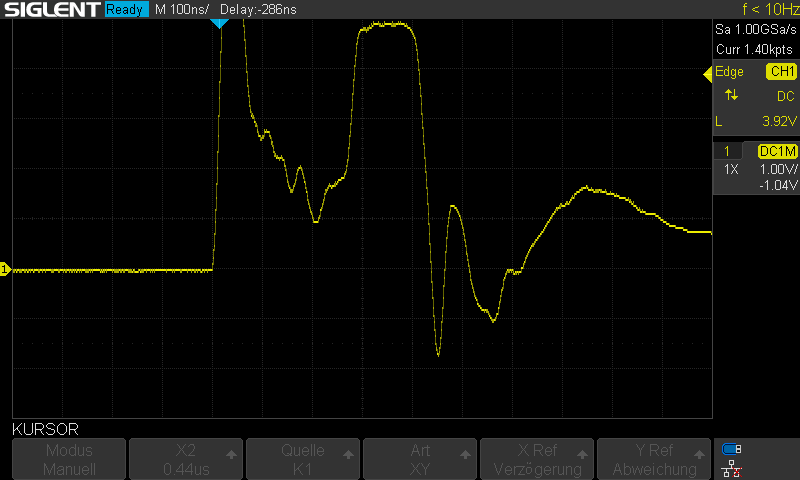
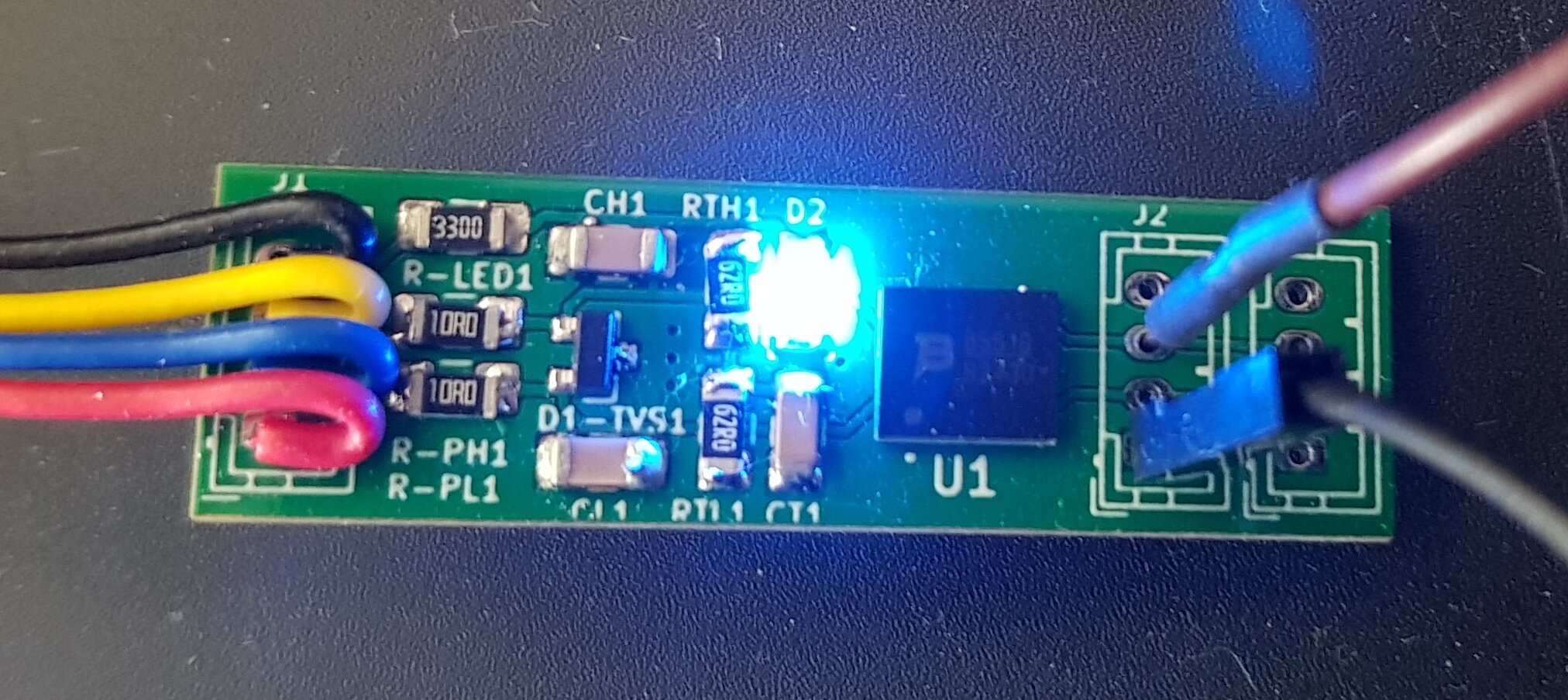
So, es geht weiter mit Messergebnissen. Dr. Board hat die Leiterplatten bestückt und mir zur Messung zugesendet. (Achtung rot und schwarz wurden vertauscht) Die Eingangsseite ist rechts, wo sich die doppelte Buchsenleiste befindet. Die linke Seite ist die Anschlussseite zum VESC, der geschützt werden soll. Die Leiterplatte wurde vollständig bestückt, also auch mit den Abschlusswiderständen für den CAN-Bus. Sollte der VESC mit 120Ohm terminiert sein, so muss dieser Widerstand im VESC entfernt werden, oder man lässt die beiden 60Ohm Widerstände und den Kondensator CT1 weg. Zuerst ein positiver Impuls am Eingang der mit ca. 30V viel zu hoch ist. Es sind Transienten über 30V zu beobachten. Die Messschaltung ist ein Kondensator 10uF, der mit 30V aufgeladen wird. über einen 1Ohm Serienwiderstand wird der Kondensator direkt auf den Eingang gegeben. Hier ist die Schutzwirkung sehr gut zu beobachten. Die Eingangsspannung (lila) wird auf ca. 15V (gelb) begrenzt. Der Einschwingvorgang liegt im ns Bereich. Hier das Ergebnis zeitlich feiner aufgelöst. Auch wenn die Eingangsspannung negative Werte erreicht (lila) -30V schützt die Schaltung den Eingang vom VESC. Mehr als -10V (gelb) kommen nicht durch. Wie schützt der U1-Baustein aus Stromverlaufssicht (1V entspricht 1A) Der Strom erreicht einen kurzen Spitzenwert, bis die Schaltung rettend diesen auf 2A begrenzt. Damit hat die Spannungsbegrenzung eine Überlebschance. Zeitlich feiner aufgelöst Hier ein Langzeitverlauf der Strombegrenzung Fazit Es kann ein gewisses Schutzniveau erreicht werden. Die auf 15V begrenzte Spannung zum VESC könnte auf ein niedrigeres Niveau gesenkt werden. D1-TVS sollte ggf. durch andere bipolare TVS-Dioden ersetzt werden. Blaues Licht (LED ist unverzichtbar, wenn hier auch ohne jede technische Funktion)
-
Optokoppler Lösung
-
Also nochmal. #1 GND und 3v3 kommen nur von einem vesc #2 niemals GND und/oder 3v3 vom anderen vesc zusammenschalten. #3 Der Griff hat die Anschlüsse GND, Vcc (hier 3,3V) sowie Signal out (Hallsensor Wert). Der Hallsensor Ausgang kann theoretisch an beiden vesc (analog in) angeschlossen werden. Aber der zweite vesc, der nicht mit GND am Griff angeschlossen ist, stellt seinen Potentialbezug über Akku GND her. Und dort sind die Störsignale drauf. Du wirst das ggf. nicht auf dem Basteltisch sehen, aber bei den höheren Fahrströmen sieht das anders aus. Dann kann der zweite vesc andere Werte wie der erste vesc abbekommen. Ich rate weiterhin davon ab. VG Barney Ja, es ist noch schlimmer, ich bin beruflicher Bedenkenträger.
-
@Kai Meine Antwort von heute ist verschwunden. Ich habe über den E-Mail Link geantwortet und zum Schluss Ampeln aus Bildern selektiert. Ich konnte auch meine Antwort sehen. Jetzt ist sie weg.
-
Du müsstest beide GND Anschlüsse der Akkus zusammenschalten. Du hast aber aufgrund des Zuleitungswiderstand eine Spannungsdifferenz zwischen den GND Anschlüssen am VESC. Diese Störsignal findet sich im analogen Eingang wieder.
-
Ich würde das nicht mit einem analogen Signal machen. Du hast Störungen auf dem Signal und bei zwei VESC Potentialversatz. Dann koppel beide besser über den CAN Bus.
-
Ja geht, aber nur einer sollte den Empfänger versorgen. Ich empfehle einen Optokoppler zur Potentialtrennung. Ich hoffe du meinst mit zwei Motoren! Parallel auf einem Motor geht nicht.
-
Der Winkel Encoder war kein Erfolgsmodell. Durch die kleinen Toleranzen wird der Winkel des Motors nicht exakt abgebildet und eiert beim langsamen laufen mit den Encoder. Ich habe es in der Praxis beim Fahren gespürt.
-
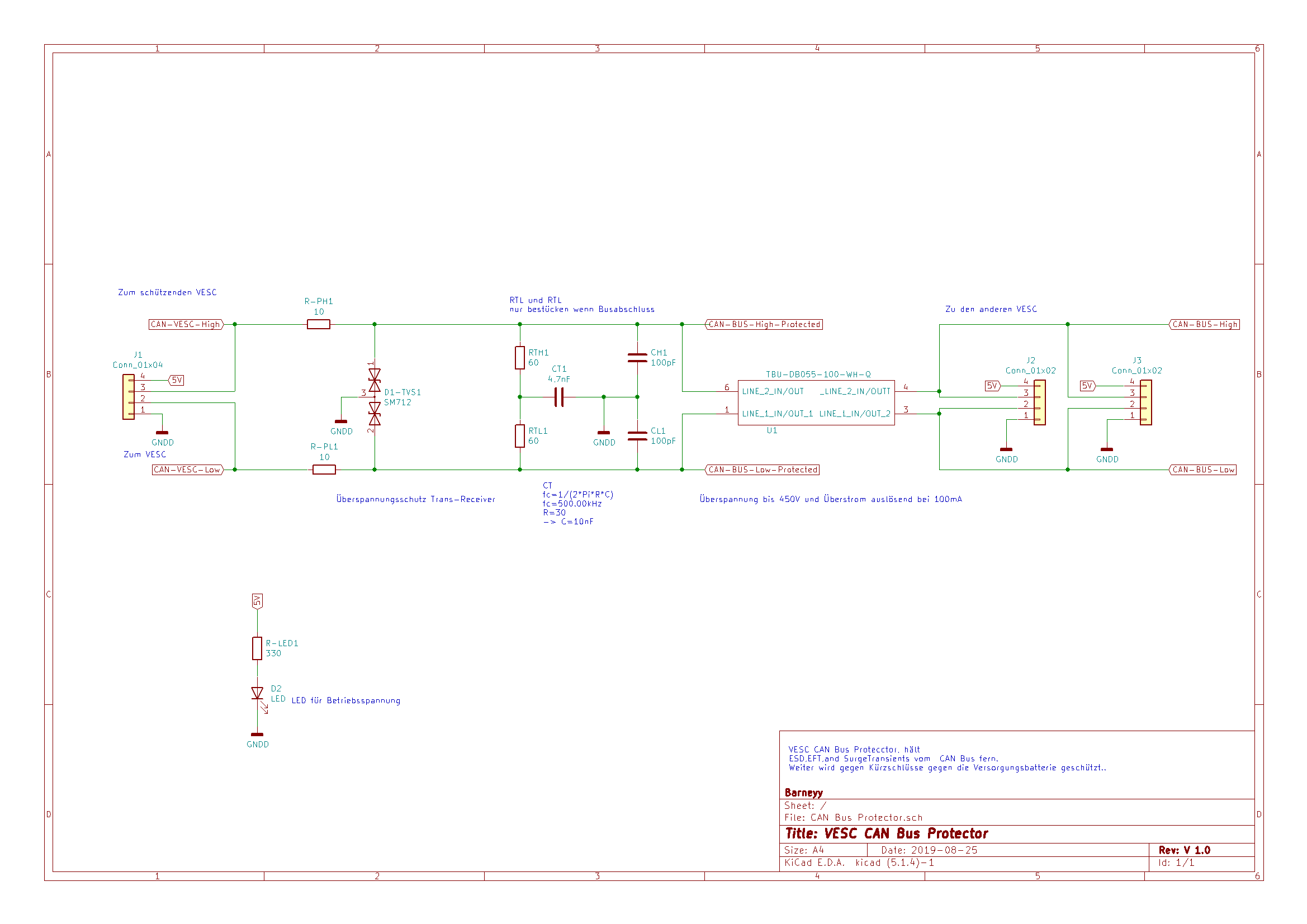
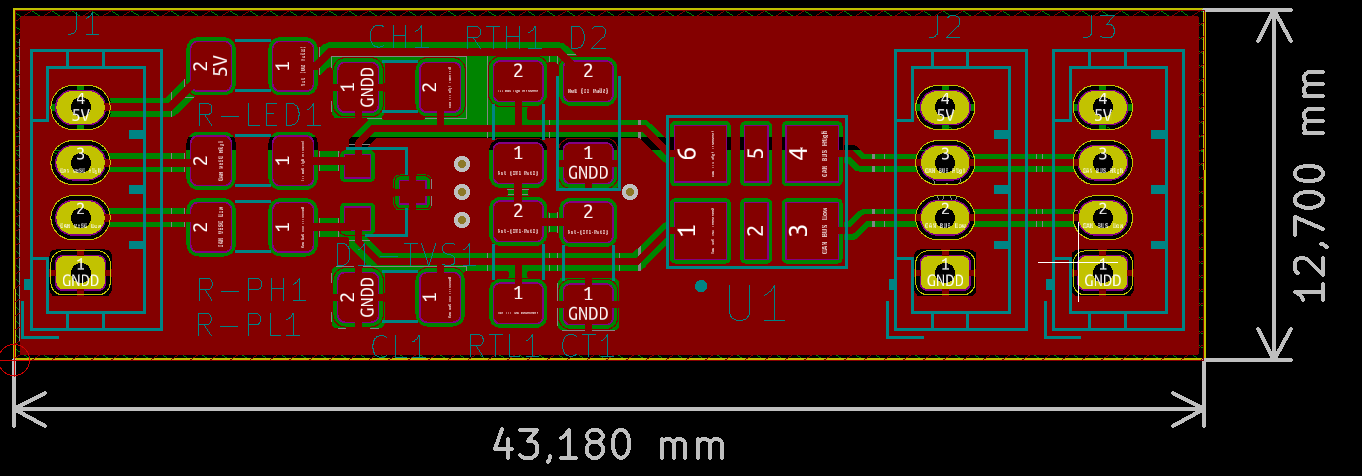
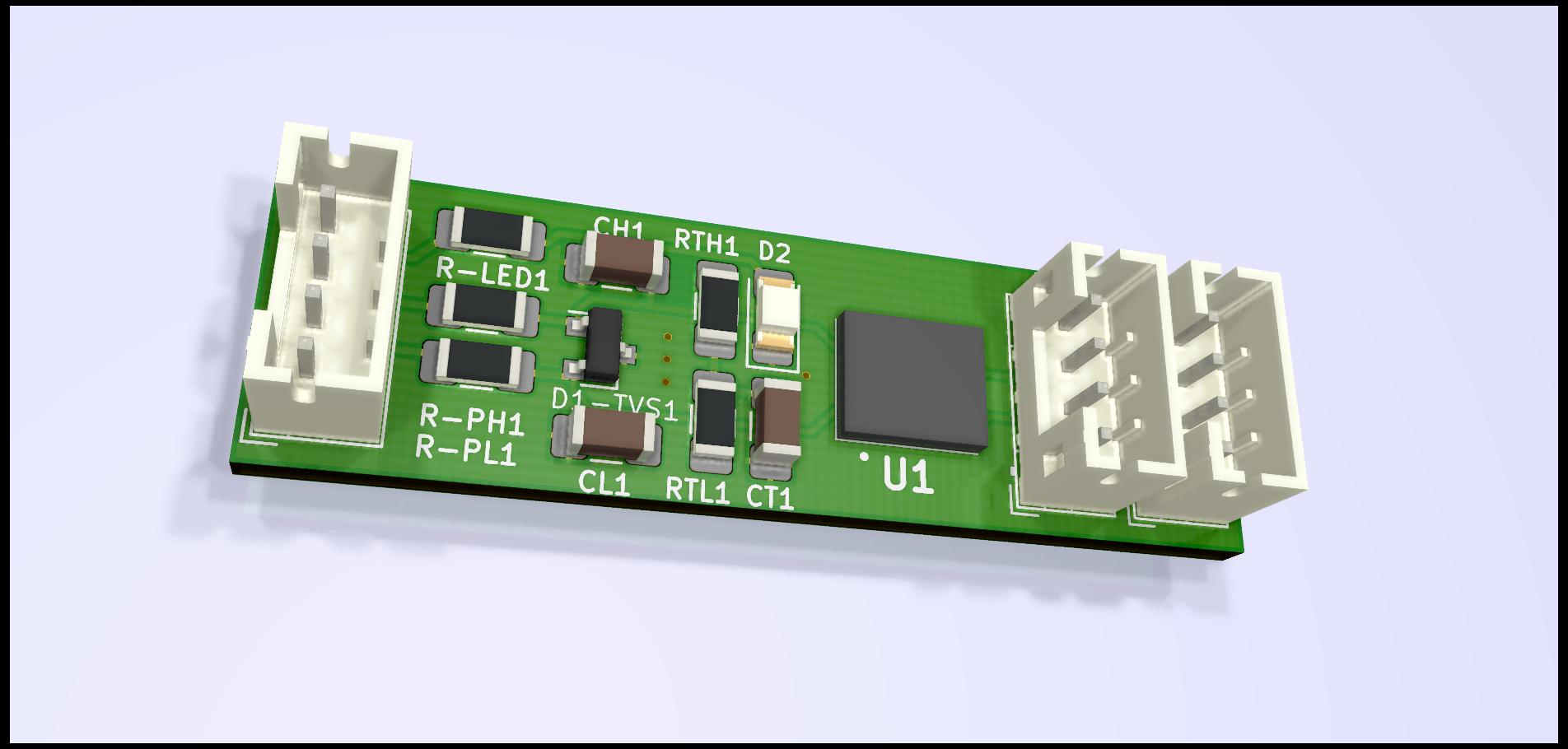
Ein neues Projekt! Es soll Eingenbauprojekte geben, die bei Verwendung von vier VESC und den CAN-Bus den DRV Tod sterben. Konkreter Anlass ist das Allrad-Projekt von Dr. Board. Bei vielen VESC -Reglern ist der CAN-Bus ohne Schutzschaltung aufgebaut. Der Trans- Receiver-Baustein ist ohne Schutzbeschaltung gegen "ESD, EFT and SurgeTransients" direkt auf den CAN-Anschluss geschaltet. Es gibt zwei Fehlerbilder, die zur Beschädigung des VESC führen: 1. Die Masse (Minus) des VESC driften zu weit auseinander 2. Kurzschluss CAN-Bus gegen Ubatterie Die nachfolgende Schaltung soll gegen beide Fehlerbilder helfen (Keine Garantie auf Funktion, Zuverlässigkeit oder Sicherheit dieser Schaltung!) Schaltplan Layout 3D-Ansicht Ich vermute das die Leiterplatte mit Bauteilen unter 12 Euro liegt. Die Fertigungsdaten und die BOM wird demnächst hochgeladen. Frage: Hat hier einer negative Erfahrungen mit dem CAN-Bus? Schaltplan.pdf
-
 Skateboard mit Staubsauger? Wenn das WAF kompatibel ist, eine mögliche Lösung.
Skateboard mit Staubsauger? Wenn das WAF kompatibel ist, eine mögliche Lösung. -
Ein billiger Hobbyking ESC mit Arduino
barney antwortete auf Renchtaler's Thema in: Elektro-Skateboard Werkstatt
War im Zeitablauf zu erwarten gewesen, aber es musste aufgezeigt werden. 😁 -
Ein billiger Hobbyking ESC mit Arduino
barney antwortete auf Renchtaler's Thema in: Elektro-Skateboard Werkstatt
Delay zu verwenden ist kriminell. Dafür sind die PWM Ausgänge da. Oder die fertigen Servo Routinen. Ich habe ei en Teensy im BamBam Controller verwendet und arbeite mit PWM und drei Zeitgeber, die einen IRQ auslösen. Quasi ein RT System.