

barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Beiträge erstellt von barney
-
-
Ich wollte 35 Stück beauftragen. Aber nicht 150 Hall-Sensoren, wo ich weiß ob die passen....
-
Nochmal für Dummys wie mich ( die immer zu wenig Zeit für die Wichtigen Dinge haben ).
Es sind Bidirektionale Hall sensoren. Das heist sie unterscheiden nicht zwischen Nord u Süd.
Motor mit
12 Pole
14 Magnete
Sensor 3 x 120 Grad => Alle 4 Pole ein Sensor => alle 4 2/3 Magnete ein Sensor
A B C A Sensor Position in Magneten 0 -> 4 2/3 -> 9 1/3 -> 14
Spannend dabei ist eigentlich der Impuls nach 1/3 -> 2/3 -> 3/3 des Weges zu dem nächsten Magnet.
D.h. Wenn der Rotor sich um einen Magnet weiter dreht. dann gibt es 3 Impulse.
Die Magneten sind in einem Abstand von 360 / 14 => 25,71 Grad
17.14 Grad => 2/3 des Magnetabstands
Damit triggern 2 beteiligte Magnete den Impuls im Abstand von 1/3 des Magnetabstands.
Das würde dann damit auf das gleiche herauskommen wie bei einer 120 Grad verteilung. ( 3 Impulse pro Weiterdrehen um einen Magnet )
gRuss Ralf
Wie fange ich an:
Bidirektionale Hall-Sensoren: DRV5013
Sieh dir mal Seite 10 im Datenblatt an. Die unterscheiden schon zwischen N/S. Norden ist low und Süden ist high, wenn man das Latch mal weg lässt. Wichtig ist es die Flanke auszuwerten. Also, ob der Hall ein rise oder fall meldet. Also nur ein Flanken fall oder rise Impuls pro N. Flanken und IRQs machen sich immer gut.
Bei den Rest kann ich dir nicht mehr folgen. Da benötige ich eine Flasche Rotwein. Den vertrage ich aber nicht. Also lasse ich es.
VG
Barney
-
Das hat auch mir die Augen geöffnet.
Mein Denkfehler war, dass man ja nicht die Wicklung schaltet, wenn der Magnet schon über dem Anker steht sondern wenn er noch (17,14°) davor ist.
Man will ihn ja zum Anker hinziehen um eine Kraft zu erzeugen, welche ein Drehmoment auf die Welle bringt. Das Prinzip Motor, ja da war ja was

Hallo Beatbuzzer,
nicht ganz, hier ist ein kleiner Gedankenfehler. Es geht noch nicht um den Vorwinkel. Ich habe das Modell dahin vereinfacht, das der Hall-Sensor schaltet, wenn der Magnet exakt über den Pol steht. Also A-Hall schaltet, wenn N über 0° A-Pol steht. Der nächste N-Magnet steht 17,14° vor dem B-Pol, also auch die 17.14°, die der B-Hall-Sensor nach dem A-Hall steht. Heißt also, wenn der Motor 17.14° weiter dreht, steht ein N-Magnet über den B-Pol und ein N-Magnet am B-Hall, der dann sein Schalt Signal geben wird. C ist analog anzusehen. Jetzt kann man dieses A-B-C-Hallsensor Konstrukt entsprechend der Motoranforderung um einen Vorwinkel X verdrehen. Wenn man dann mit einer Strommesszange dann das Minimum findet, ist alles richtig eingestellt.
VG
Barney
-
Und kann jetzt die Leiterplatte in Auftrag gegeben werden? Und sind jetzt alle Wünsche integriert?
-
Ja, ich bin auch Verfechter der 30°-These!
Jetzt ist der Knoten geplatzt. Wenn man sich die drei Statoren aufzeichnet und die Magnete (14) als 7 Pole (nur N) zeichnet, fällt es wie Schuppen von den Augen. Ich versuche es mal ordentlich zu zeichnen. Auf jeden Fall auf die Schnelle:
360/7 Pole = 51.42° / 3 Sensoren = 17.14°
Beim Zeichnen hat man Statoren bei 0° (A), 120° (B), 240° ©.
Wenn ein Magnet (N) bei 0° (A) steht, steht der nächste Magnet bei 51.42° und der übernächste bei 102.86° - also 17.14° vor dem 120° Stator B! Wenn man das Spiel weiter treibt, N x 51.42°, N=4 -> 205,71° - also 34.28° vor dem 240° Stator C!
Damit ist mein Weltbild gerettet.
VG
Barney
Edit vor und für im Text vertauscht! Nur ein Schreibfehler!
-
 2
2
-
-
Passt es so besser?
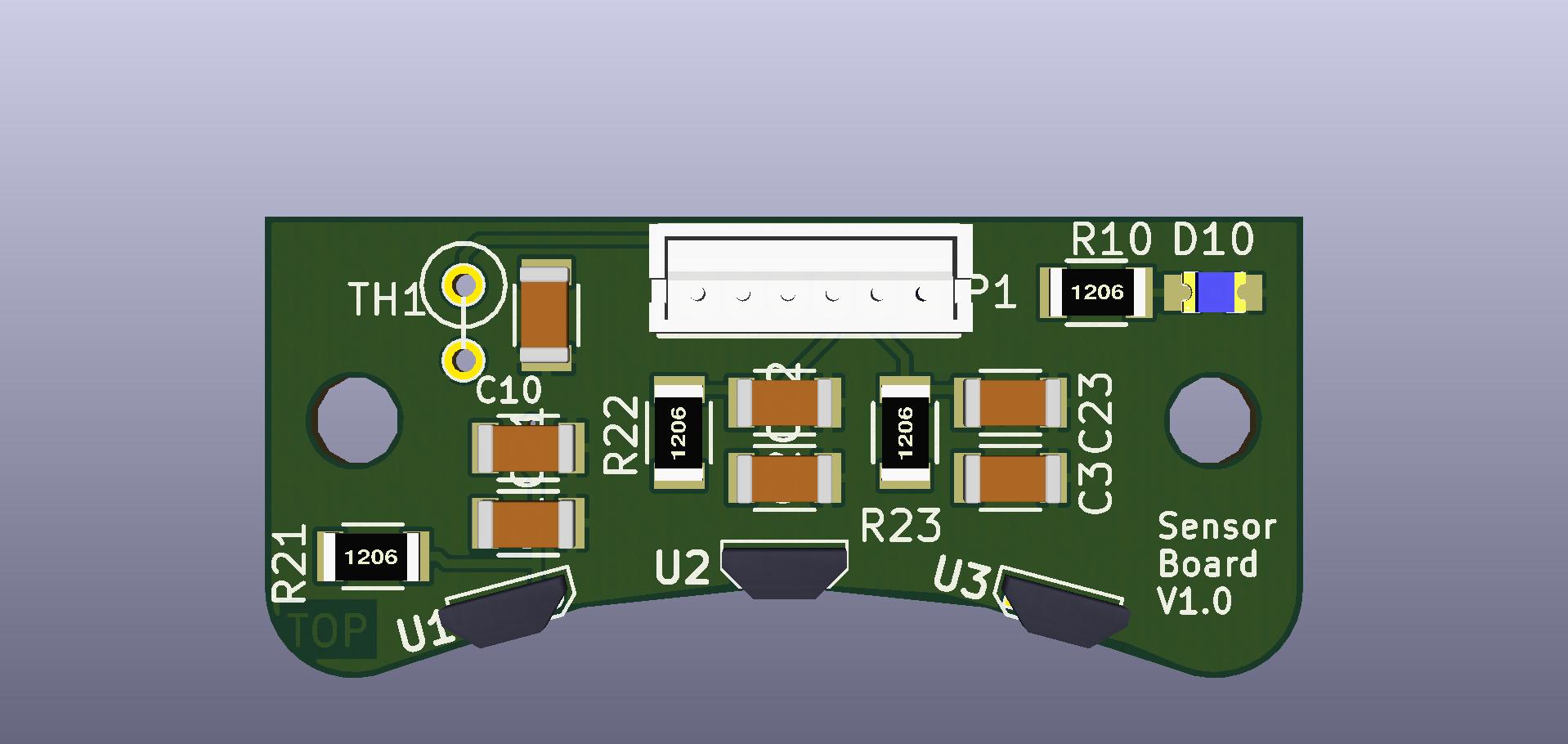
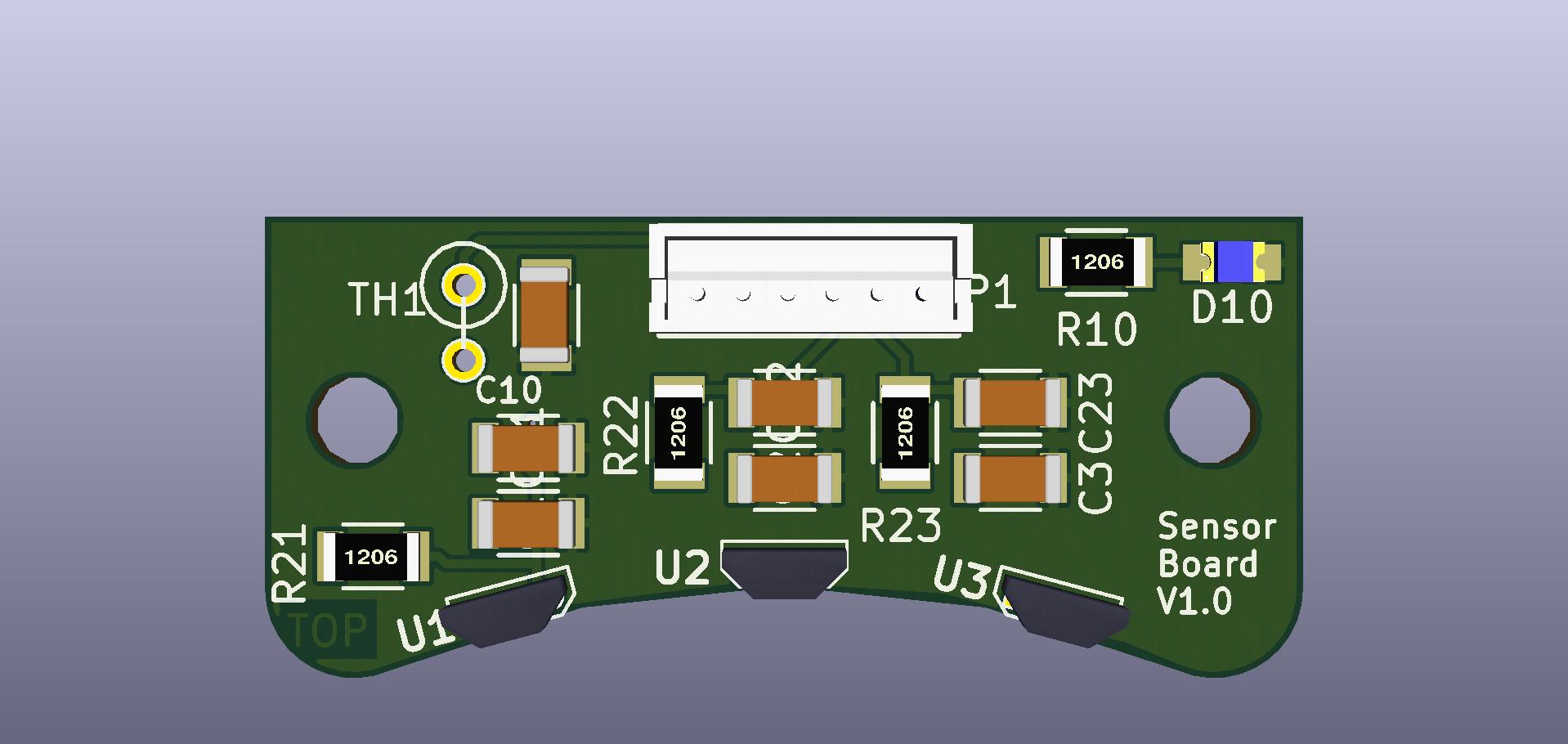
Anbei der Schaltplan. Kann gerne gesichtet werden!
-
Die Buchse sieht richtig aus. Ich glaube das Rastermass war 1,5mm?
Hatte mir die beim Conrad bestellt, hat gepasst.
Und Stimmt, es sind 1,5mm. Natürlich gab es dafür keine Lib. Also selber zeichnen. Und das Layoout musste stark verändert werden, da keine Leiterbahnen zwischen den Pins passten.
So, ist dass jetzt so, wie es benötigt wird?
-
Die Buchse sieht richtig aus. Ich glaube das Rastermass war 1,5mm?
Hatte mir die beim Conrad bestellt, hat gepasst.
Mist,
nicht 2,5mm? stelle gerade fest, es gibt 1.5mm, 2mmm und 2.54mm!
Wie war deine Bestellnummer?
Edit:
Laut der Rules, 1.5mm. muss nochmal neu zeichnen.
-
15,5mm hoch.
Die Buchse ist nicht 100% gleich. Wer solch eine Buchse hat, bitte prüfen, ob die Größe passt!
-
Mit der Buchse das wäre sehr gut! Zur Verkablung gibt es ferige Teile.
http://www.e b a y.de/itm/400553423898?_trksid=p2060353.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT
Für jeden leicht zu handhaben!
Arndt
PS.: Temperatur ist für mich uninteressant - aber ihr wollt es ja immer sehr genau wissen. Benedikt hatte keinen Temperatursensor angeschlossen.
Auftrag erkannt und wird ausgeführt!
-
Kann mir einer sagen ob nun NTC / PTC? Wer solch einen Motor hat, bitte einfach nachmessen und hier das Ergebnis posten.
-
Glaub der Widerstand gehört in die Statorwicklung "eingewickelt". Wär zwar sinnvoll, aber der Aufwand lohnt wohl nicht. Dem Regler (ESC HK 150A) scheint es egal zu sein wenn der fehlt.
Sicher ist das, das Optimum. Ich messe derzeit die Temperatur des Motors an der Verschraubung zum Motorhalter. Es ist nicht die Wunschstelle, zeigt aber eine Tendenz auf, ob man den Motor grillt.
Ich wie mit dem Motorregler. Da messe ich die Temperatur auf dem Kühlkörper, nicht am/im MOSFET. Manchmal muss man Kompromisse eingehen.
-
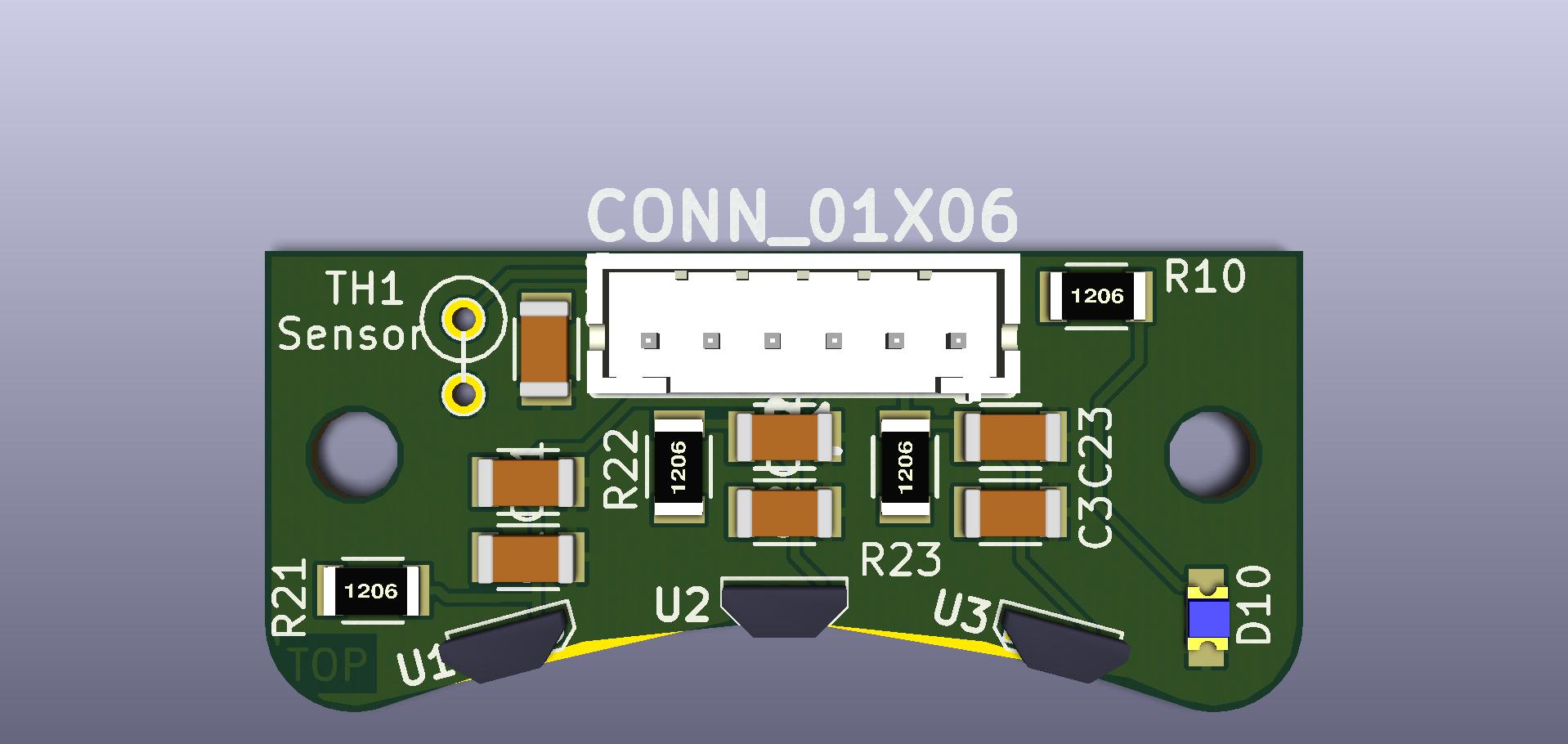
Na dann würd ich sagen verpassen wir der Sensorplatine doch gleich eine JST ZHR6 Buchse?
Und einen Temperaturwiderstand?
Jippi, gibt es bei Segor. Jetzt nur noch in Kicad.
Was für einen 10k Thermistor ist denn gemeint? NTC oder PTC? Welche Klasse?
-
Einer müsste Temperatur sein!
-
Sieht sehr gut aus Barney :thumbsup:
Muss man die Beiteile selber bestücken?
Wenn ja geht das mit einem Heißluftfön?
Wie gesagt. Wenn du eine Platine ohne Leiterbahnen zum testen brauchst. Ist das kein Problem.
Dazu bräuchte ich deine Zeichnung und den Bohrungsabstand der Sensoren.
SMD und Heißluftfön würde klappen, aber die Hall-Sensoren müsst du löten.
Da ich noch nie eine KiCAD-Leiterplatte in Auftrag gegeben habe, muss ich erstmal sehen, ob ich die richtigen Daten für den Hersteller produzieren kann. Vielleicht schaffe ich es Morgen den Auftrag zu generieren. In 10 Tagen würden dann die Leiterplatten kommen. Die Bauteile für 20 Leiterplatten würde ich auch schon mal holen. Aber nur für 5 Leiterplatten Hallsensoren, da ich nicht weiß, ob diese gut dafür geeignet sind.
@Gerald, @Kai:
Da ich keinen ESC habe, der Sensoren auswertet, würde ich euch je zwei Leiterplatten zusenden. Wenn ihr sagt, das passt, können wir weitermachen.
-
Gratuliere. Schwein gehabt.
-
Hallo Barney und natürlich auch allen anderen,
Ich bin neu hier im Forum und habe mich schon in vielen Berichten eingelesen. Ganz besonders diesen hier. Ich finde es faszinierend, wie man so ein Projekt umsetzen kann und dieses dann auch noch einfach mit jeden so teilt (Wo ich sehr dankbar für bin).
Aber jetzt erstmal zu meiner Frage: Ich habe im Wiki gelesen, dass diese Steuerung über Nunchuk ca.80€ in einer Sammelbestellung kostet. Wenn man nun Interesse hätte, wie läuft sowas ab. Gibt es einen Tweak, wo auf diese Bestellung aufmerksam gemacht wird?
Gibt es alternativ ein Geschäft, was zu empfehlen ist, um die Platine herstellen zu lassen. Vor den Löt- und Programmierarbeiten würde ich mich nicht verstecken.
Mit freundlichen Gruß
St1ft
Hallo St1ft,
willkommen im Forum.
Ich mache es mal stichpunktartig:
* Ich habe keine Leiterplatten mehr übrig.
* Die aktuelle Platine ist im Wiki zum runterladen.
* Ich habe bis jetzt im Fischer Leiterplattenservice in Anspruch genommen. Die Qualität ist super, der Preis auch. Die Bohrungen sind nicht wie bei vielen günstigen China Produzenten irgendwo.
* Die aktuelle Leiterplatte wurde mit KiCAD entworfen, da habe ich mit Fischer noch keine Erfahrung.
* Dir ist es freigestellt, die Leiterplatte fertigen zu lassen. 5 Stück sind der unterste Auftragswert.
* Die Bauteilquellen stehen im Wiki.
* Frag doch mal rum wer noch eine haben will.
VG
Barney
-
Preis:
30 Stück ohne Bauteile und MwSt. ca. €50,- mit Bestückungsdruck. Ohne Druck €40,- 10 AT
5AT €80,-
Bitte nicht festnageln. Ungefährer Preis.
Bauteile ohne Porto:
3 x Sensoren je €1,-
1 x 1uF je €0,065
3 x 100nF je €0,05
3 x 680pF je €0,05
3 x 10kOhm je €0,04
Sollte bezahlbar sein.
-
1
-
-
So soll es sein.
Rettich.
-
Barney kommst du mit dem Platz aus für deine Platine?
Ich meinte die Anordnung der Bauteile
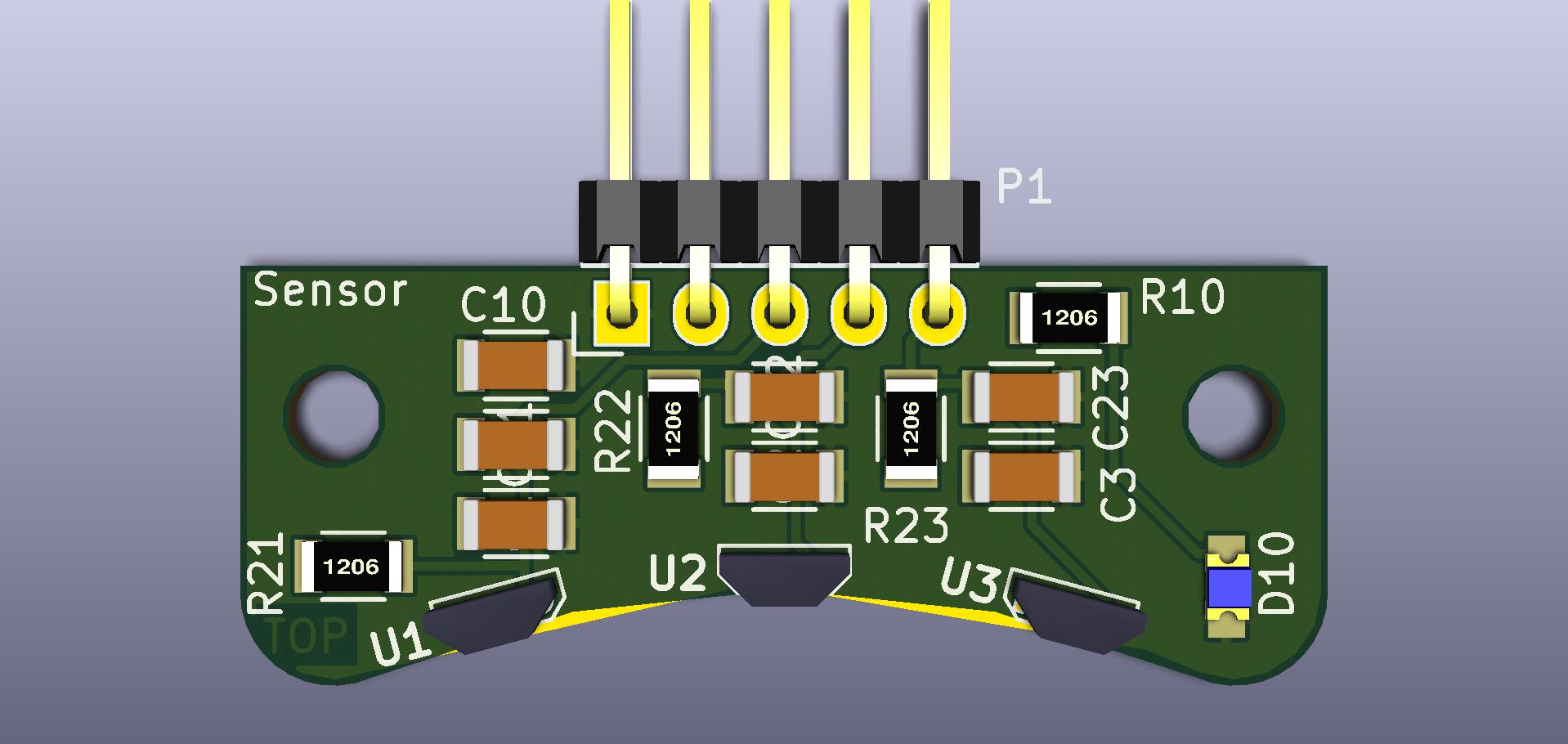
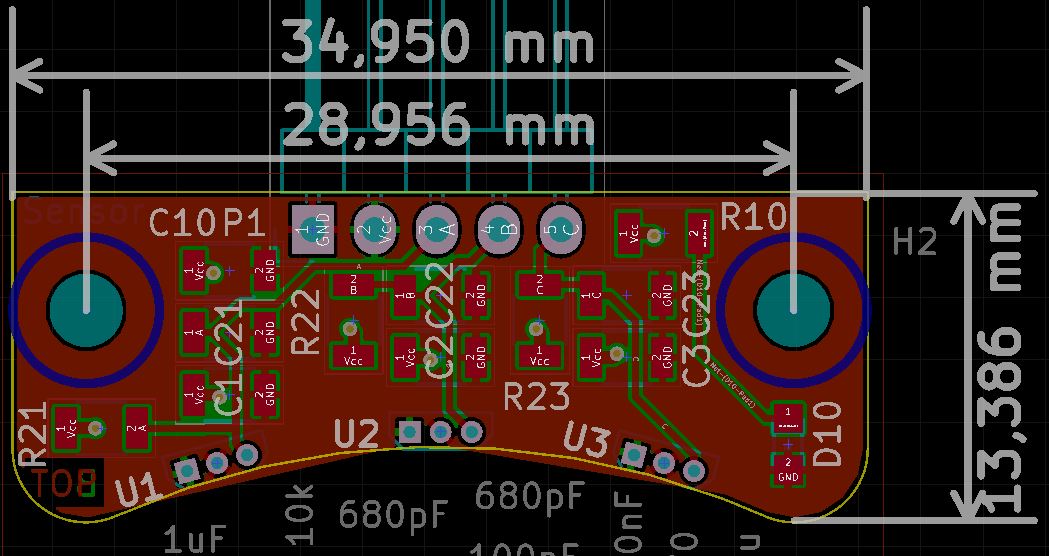
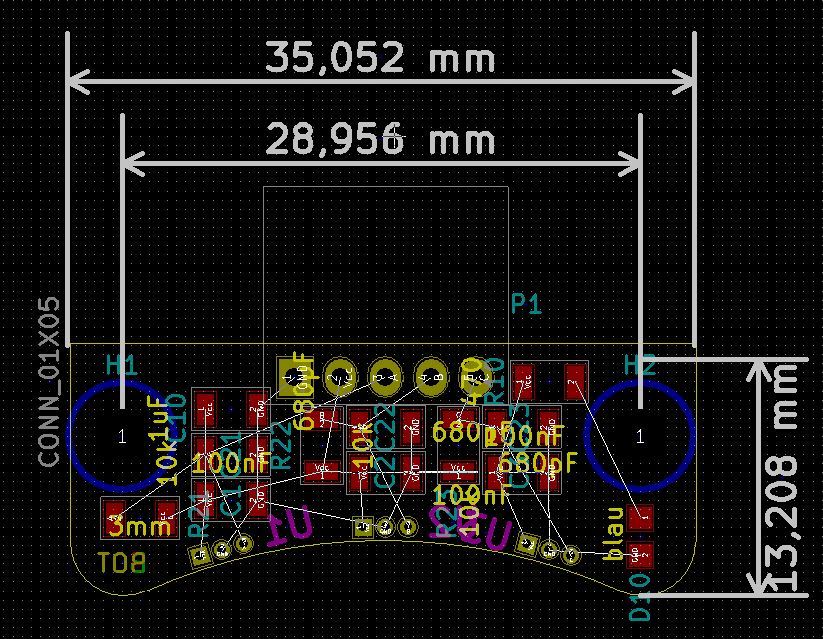
Entwurf 1:
Kleiner gehts wirklich nicht.
Mal dir das mal auf ein Stück Papier auf! 13.2mm hoch, an der dicksten Stelle. Es handelt sich um eine Leiterplatte.
-
Eiszapfen im Gesicht und die Erkenntnis, dass die Programmierung "Umschaltung" zwischen Direct Drive und Integral Drive eine zeitliche Komponente bekommen muss. Habe es geschafft zwischen den Modis währen der Fahrt ausersehen umzuschalten. Es sieht nicht elegant aus, wenn man plötzlich Direct Drive an hat und man nur sachte einbeschleunigen wollte. :devil:
Die Umschaltung sollte in einem Zeitfenster von zwei Sekunden erfolgen. Wer dann nicht vollständig alle Umschaltbefehle gesendet hat, muss erneut innerhalb von zwei Sekunden versuchen. Alle alten Befehle werden dann verworfen.
-
Der Einstieg für die Geschwindigkeit und Reichweite steht im Wiki.
Als Motor hat sich der C6354 rausgestellt. Damit geht kick push.
Bremsen geht mit einigen Controllern mit dem Motor.
Ü40 ist nicht zu empfehlen. Sieh mal im Verletzungsbereich nach. Selber mit 33 Km/h unterwegs und zufrieden.
Rest folgt...
VG
Barney
-
1
-
-
Ich dachte die untere Tasche ist die Aufnahme der Platine? Ich habs jetzt geschnallt wie rum! Ich zeichne es nachher mit deinen Maßen. Sollte klappen. Denke an den Kabelauslass für die Sensorleitung.
-
An die Freunde der nahtlosen Bandbreitenadaption.
Bitte keine Konstrukte, die nicht jeder "Depp" ohne äußere Hilfe und Chemie-Kenntnisse nachbauen kann. Ich möchte einen simplen Aufbau, den man auf den Motor steckt, ausrichtet und nie wieder auffällig wird. Einen Motorring nehme ich sofort. Eine kleine Leiterplatte mit deterministischen Verhalten auch. Da ich meiner Meinung nach genügend Informationen zusammen habe, werde ich die Leiterplatte mit den Pull-Up Widerständen und den Filter-Kondensatoren weiterführen. Vielleicht mache ich auch noch eine Debugging Platine. Mal sehen was der Leiterplattenhersteller dazu sagt. Wir sind bald bei 20 Platinen. Das macht mir sorgen. Ich weiß nicht, ob ich den richtigen Sensor rausgesucht habe und eine Probecharge habe ich auch noch nicht gemacht. Hat einer von euch die Möglichkeit den Mechanisches Muster auf einer Leiterplattenfräse anfertigen zu lassen, um die Maße zu bestätigen, besonders den Winkel von 17.14°.
Wir sollten hier jetzt einen Redaktionsschluss setzen, wie bei einer Diplomarbeit, sonst kommen wir nicht zum Ende. Bis hier 86 Beiträge!
VG
Barney

Hallsensoren nachrüsten
in BamBam
Geschrieben
Hallo Kai, Hallo yoma und alle anderen Beteiligten,
ich habe gerade den Auftrag für 10AT losgesendet. Da ich noch nie KiCAD Daten zur Verarbeitung gegeben habe, hier also den Gerber-Standard, bin ich auf die Reaktion des Leiterplattenherstellers gespannt. Es werden voraussichtlich 30 Stück werden.
Wie geht es Weiter?
Kai und Yoma,
ich würde vorschlagen, dass wir zu dritt die Leiterplatte testen. Ich würde für 6 Leiterplatten Sensoren und Buchsen, aber für 30 die restlichen Bauteile kaufen. Jeder von uns bekommt zwei Leiterplatten zum Testen. Da ich keinen ESC habe, der Sensoren auswertet, sehe ich mir das nur am Oszi an. Solltet ihr bestätigen, dass ist es, dann hole ich mehr Hall-Sensoren. Damit alles in einen gepolsterten Briefumschlag passt, wird nichts gelötet, das macht ihr alles selber!
Ich hoffe, dass es keine Probleme mit dem Layout gibt und die 17.14° wirklich bei der Positionierung erreicht wurde. Die Hall-Sensoren können leicht schräg gelötet werden. Drückt mir die Daumen!