Roman1
-
Gesamte Inhalte
1 -
Benutzer seit
-
Letzter Besuch
Roman1's Achievements
")
Newbie (1/14)
0
Reputation in der Community
-
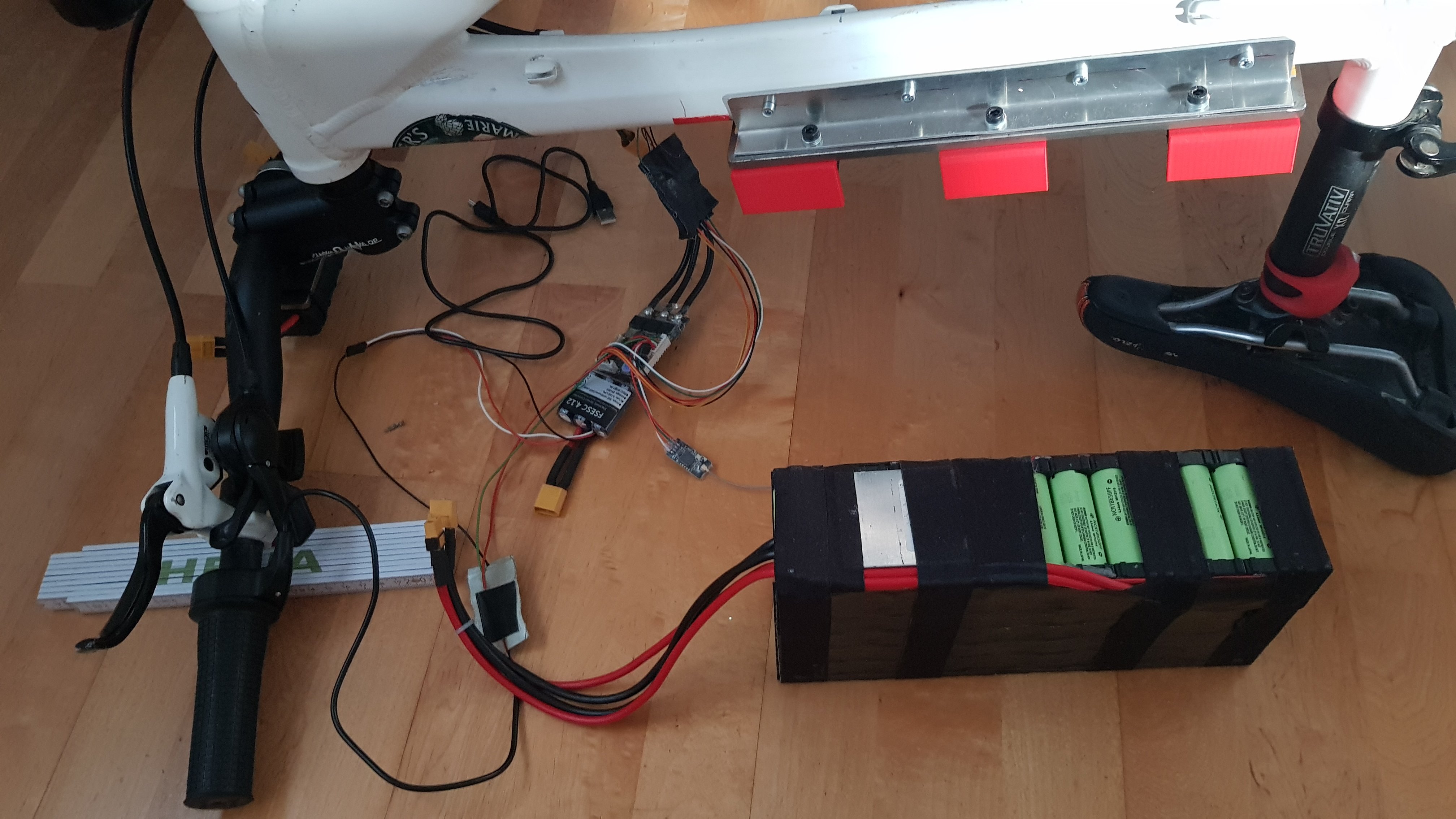
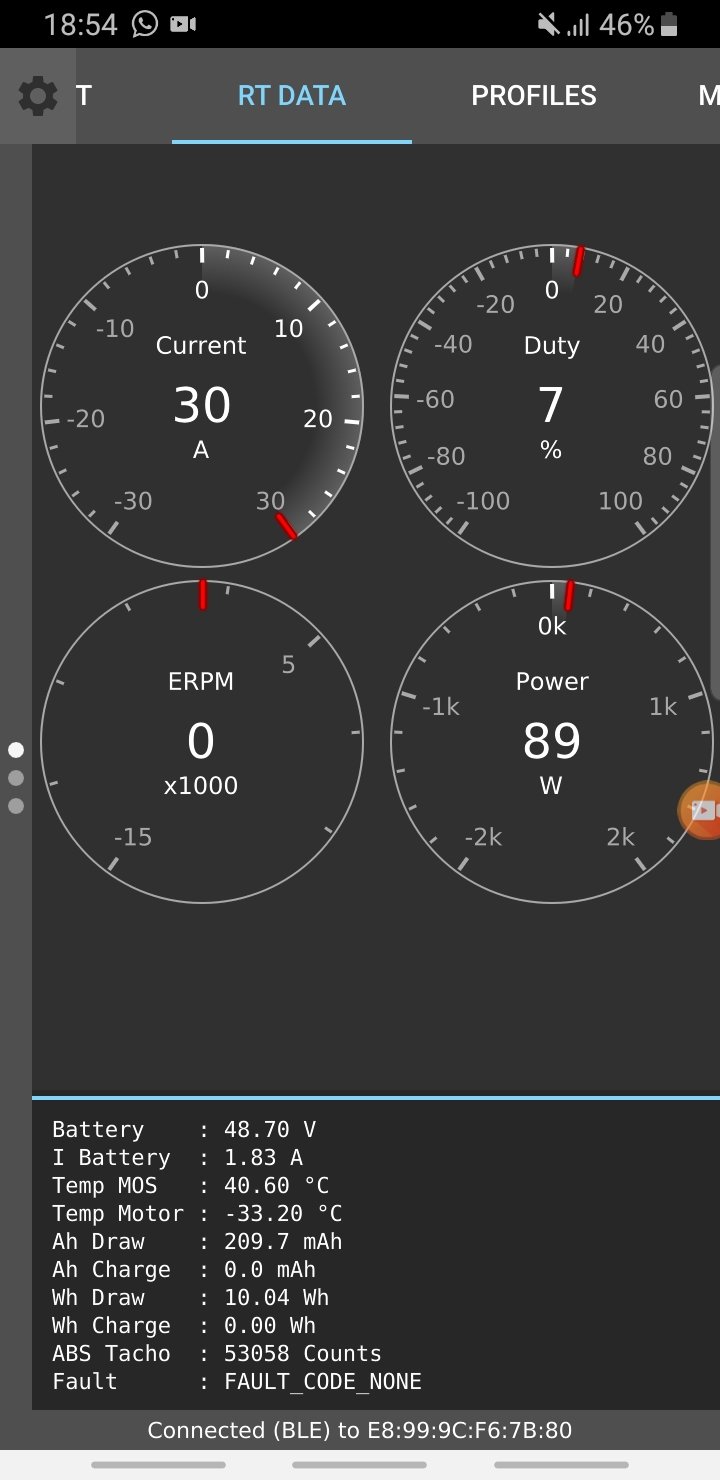
Hallo zusammen, ich bin neu hier, bin aktuell an einem Umbau eines E-Bikes. Das war zuvor ein normales Rad.. mit einem Umbausatz hatte ich es über ein Felgenmotor + Controller und Akku (1500W) motorisiert. Aber die Lust zu einem Umbau kam wieder hoch.. Also habe ich mit ein original FLIPSKY FSESC 4.12 bestellt Link: FSESC 4.12 50A Based on VESC® 4.12 FLIPSKY.NET The Flipsky ESC is based upon the VESC Open Source Project, and compatible with VESC Software. Hardware:V4.12, Firmware: V3.40(Keep upgrated with the latest firmware version),PCB:4 layers, size: 40*60mm... den habe ich soweit korrekt angeschlossen.. Die Parametrierung wollte ich mit dem VESC Tool von Benjamin Vedder machen. VESC Project VESC-PROJECT.COM Das hat auch soweit eigentlich geklappt, der Motor dreht, die Steuerung übernimmt alle Werte alle Werte etc. Jetzt aber zu meinem Problem: Ich bekomme aus dem Stand und geringer Geschwindigkeit keine Leistung (c.a. 100W) aber wenn ich schneller fahre nimmt die Leistung zu (bei 60km/h etwa 1000W) Das ganze verhält sich gefühlt recht linear, ich habe schon viele Parameter ausprobiert, sowie auch ein Firmware update ... ich komme nicht weiter. Ich packe euch mal die Konfigurationen und etwas Anschauungsmaterial in den Anhang. Auf dem Video ist die Abhängigkeit von Geschwindigkeit und Leistung zu sehen, auf einem Screenshot die Maximale Leistung "beim Anfahren". Vielen Dank schon mal im Voraus. Beste Grüße Roman 20190916-185239-720x1480.mp4 app.xml motor.xml