muellerromain@gmail.com
-
Gesamte Inhalte
5 -
Benutzer seit
-
Letzter Besuch
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von muellerromain@gmail.com
-

E-Longboard Laufprobleme
muellerromain@gmail.com antwortete auf muellerromain@gmail.com's Thema in: Eigenbauten
Nein. Wie kann man den konfigurieren ? -
E-Longboard Laufprobleme
muellerromain@gmail.com antwortete auf muellerromain@gmail.com's Thema in: Eigenbauten
VID_20200524_210825.mp4 VID_20200524_210825.mp4 VID_20200524_210825.mp4 VID_20200524_210825.mp4
-
E-Longboard Laufprobleme
muellerromain@gmail.com antwortete auf muellerromain@gmail.com's Thema in: Eigenbauten
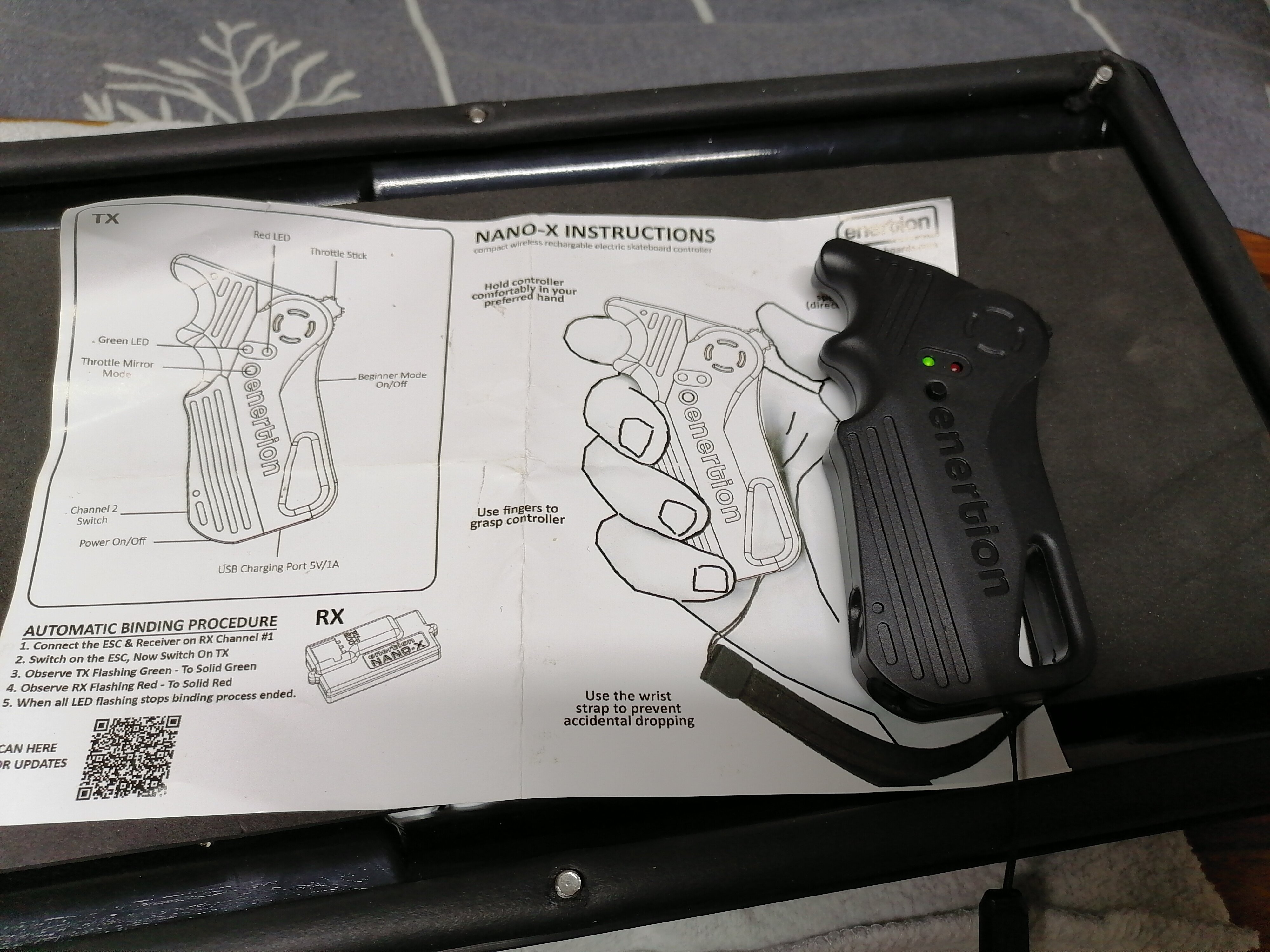
Ich bin auf ein neues Ergebniss gekommen. Sobald ich den Empfänger vom Controller Emotion Nano X entferne, geht die Bremse auf. Ist ein umprogrammieren vom Controller/Empfänger möglich? Ich habe es schon auf den weiteren Stecksystem Kanal 2 und Bnd probiert aber ohne Erfolg. Der Motor reagierte auf diesen Kanälen nicht . -
Hallo, ich bin am verzweifeln aber vielleicht kann mir jemand weiter helfen. Ich habe mir ein Board zusammengestellt und das Problem ist eigentlich, dass beim anfahren der Motor nicht richtig angesteuert wird (ruckeln beim anlaufen). Sobald der Motor mit Strom versorgt wird, läuft der Motor nur schwer gängig als ob er gebremst wird. Die Einstellung vom Controller ist so aufgebaut, dass beim vorwärts betätigen das Board bewegt wird (ruckeln beim anlaufen) und rückwärts der Leerlauf aktiviert ist. Ich bitte euch um Hilfestellung wie man dieses Problem lösen kann Folgende Komponenten sind verbaut: Enertion Space Cell 36V 270Wh Enertion Controller Maytech SuperESC based on VESC® Open Source Project Maytech MTO6374-170-HA-C Outrunner Sensor Motor-170-HA Zahnscheibe 20-5MR-15 (20 Zähne) - (6615,0 U/min) Zahnscheibe 48-5MR-15 (48 Zähne) - (2756,3 U/min) Übersetzungsverhältnis: 2,4 Riemen 360-5MGT3-15 (1837,4 U/min)
-
STARTSCHUSS: JayKay Kickstarter 40% Offensive ❤️ 👊 😉
muellerromain@gmail.com antwortete auf Kai's Thema in: Jaykay
Ich würde an diese Kampagne teilnehmen. Wieviele Unterstützer sind schon dabei ?