sch_ch1
-
Gesamte Inhalte
39 -
Benutzer seit
-
Letzter Besuch
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von sch_ch1
-
... ich werde deine interpretationen ausprobieren sobald mein APS kit da ist, dauert wohl noch ne woche meinen VESC hab ich inzwischen wieder, hab ihn zu dem kontakt geschickt den du mir gegeben hast und bin im prinzip sehr zufrieden. der DRV musste getauscht werden, woran der fehler letztendlich lag weiß ich leider nicht, hoffe es kommt nicht so schnell wieder ein defekt an meinen VESC bis dahin mühe ich mich durch dieses bldc tutorial auf yt: es dauert ewig und ist mühsam zuzuhören weil er auch viel abdriftet, aber ich kenne bis dato nichts besseres im netz wo das bldc tool so genau erklärt wird. vedder selbst erklärt in seinem tut ja auch leider nur die basics, und aus dem geschriebenen tut von ihm bin ich auch nicht so recht schlau geworden wenn ich mich richtig erinnere, oder es war nicht ausführlich genug... wenn jmd was besseres kennt, her damit! ein problem das ich mit meinem vesc jedenfalls noch habe, ist die gasannahme... als vesc ersatz hab ich einen hobbywing esc besorgt, bei dem funktioniert das ganz gut, die empfindlichkeit der gasannahme reagiert beim drücken des hebels schätzungsweise zwischen 20-70%. also 50% des weges den meine fernbedienung mir zum gasgeben bietet habe ich um die motorgeschwindigkeit zu regulieren. nicht optimal (100%) aber ganz gut. beim bldc tool kann ichs mittels "display" funktion genau in zahlen fassen, der motor beginnt sich zu drehen sobald der hebel auf 75% steht (wobei hier 50% die nullposition ist), dann brauch ich den hebel geschätzt nur 1.5mm weiter drücken und der motor läuft auf vollgas noch bevor die anzeige überhaupt 76% erreicht.... das ändern der pulsewidth verändert nur áb wieviel % das ganze anfängt, aber dieser 1% wirkungsbereich ändert sich leider nicht
-
Ich rate davon ab eine Kickr-Halterung nachzubauen!
sch_ch1 antwortete auf sch_ch1's Thema in: Eigenbauten
auch eine interessante lösung, aber sehe ich es richtig, dass der motor nicht adjustiert werden kann? der sitzt starr auf seiner halterung und wenn der reifen ein bisschen kleiner (oder größer) wäre müsstest du neue löcher bohren, oder? da ich mit meinem board auch gerne sliden gehe wollte ich eben eine konstruktion die ich einfach und möglichst an jedes rad montieren kann. die kickr lösung schien optimal dafür. ich greife vorherst auf eine halterung von APS zurück aber finde deine konstruktion auch interessant! man könnte die typischen halter ja auch zum friction drive umbauen, ähnlich wie du es gelöst hast, nur mit verstellbarer motorposition! mal schauen wann ich wieder geld übrig hab da was fräsen zu lassen^^ hast du die schrauben iwie fixiert oder einfach so reingedreht? -
Ich rate davon ab eine Kickr-Halterung nachzubauen!
sch_ch1 antwortete auf sch_ch1's Thema in: Eigenbauten
https://www.lindinger.at/at/flugzeuge/antriebe-elektro/motoren/planet-hobby-joker-6360-12-210-kv-10s-setup-fuer-3d-modelle-2m-spannweite-brushless-motor unter downloads findest du eine beschreibung, dort finden sich genauere daten! ich hab keinen vergleich und bin absoluter neuling im elektrobereich, bin aber soweit sehr zufrieden mit dem motor, überrascht welche kraft diese kleinen dinger heutzutage haben und habe nichts daran auszusetzen ... es hat jetzt eine weile gedauert, aber ich verstehe was du meinst, die idee find ich prinzipiell sehr gut und interessant! allerdings wird die halterung dadurch nur in position gehalten, fixieren kann man sie jedoch dann nicht mehr, zumindest müsste man das anders machen! momentan wird die halterung mittels gewinde direkt auf die achse geschraubt und mit nem kleineren gewinde auf der gegenseite mit ner schraube zusätzlich festgedreht (gegen den uhrzeigersinn lässt sich die halterung jedoch drehen, das ist ja eines meiner probleme). aber würde ich jetzt so eine einkerbung machen könnte ich die halterung nicht mehr auf die achse drehen weil ich spätestens dann hinten anstehen würde dort wo es enger wird und die halterung über die achse in position gehalten werden soll. weißt du was ich meine? -
Ich rate davon ab eine Kickr-Halterung nachzubauen!
sch_ch1 antwortete auf sch_ch1's Thema in: Eigenbauten
@evilboarder Hatte ich versucht und es sitzt auch so fest dass ich es mit den Händen nicht schaffe es durchzustehen, auch bei Testfahrten am Parkett wo sich das rad durchdrehen kann geht es ganz gut aber auf Beton mit 70kg Belastung und Unebenheiten funktioniert es je nach Intensität der Beschleunigung und je nach Vibration 2 bis 5min bis sich wieder Motor selbst oder die Halterung locker wird.... Mit einem Motor der nicht ganz so viel Drehmoment hat würde es auch länger halten aber es gibt zu viele.negative.Punkte bei der.Halterung... Hast du deinen antrieb schon fertig und funktioniert dieser zuverlässig? Wenn ja wäre ich dir über Fotos dankbar. @hainz Ich bin technisch leider nicht so aversiert und weiß gerade so gar nicht was du meinst, kannst du ev eine einfache Zeichnung anfertigen oder es anders beschreiben? -
Ich rate davon ab eine Kickr-Halterung nachzubauen!
sch_ch1 antwortete auf sch_ch1's Thema in: Eigenbauten
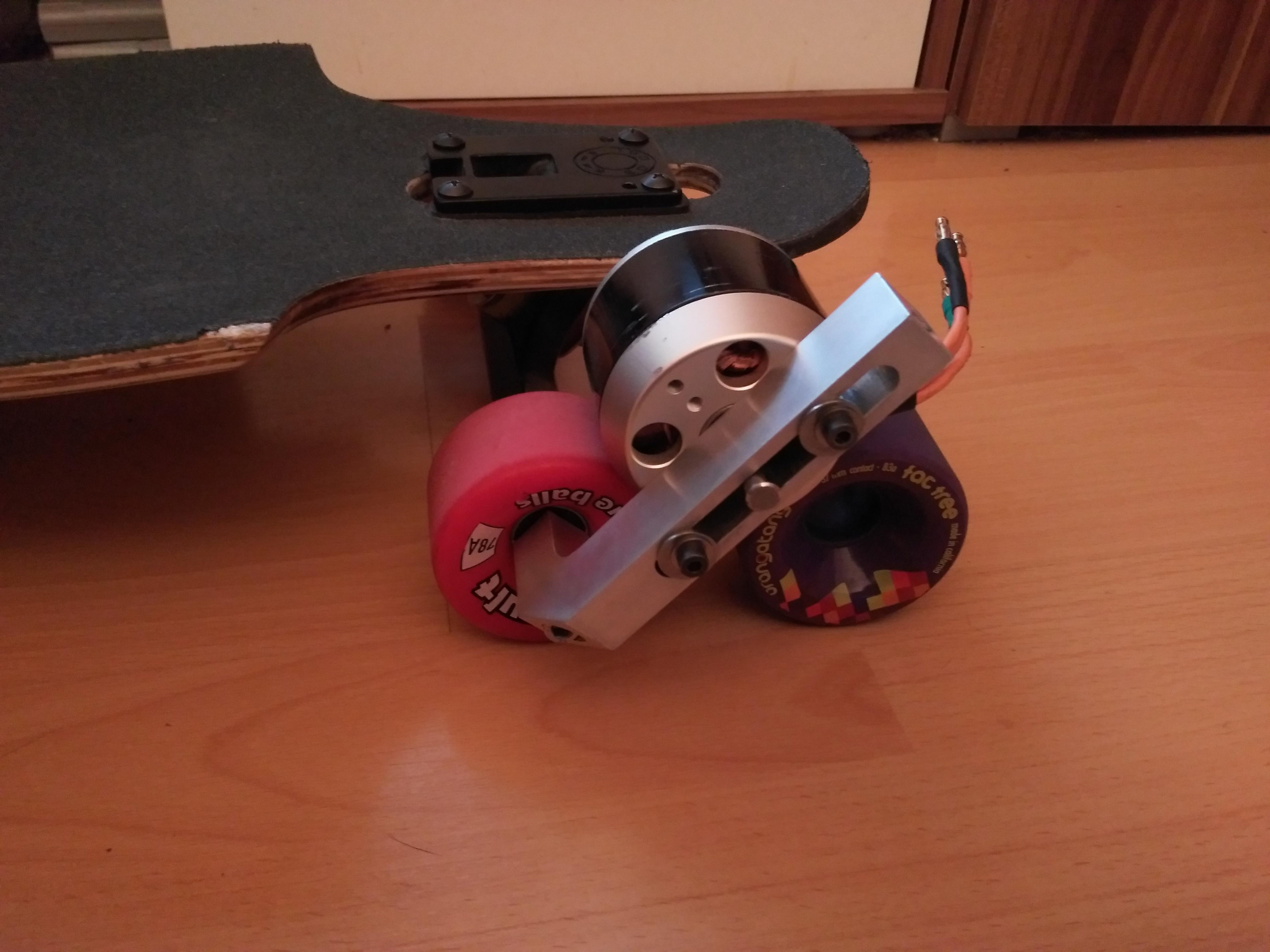
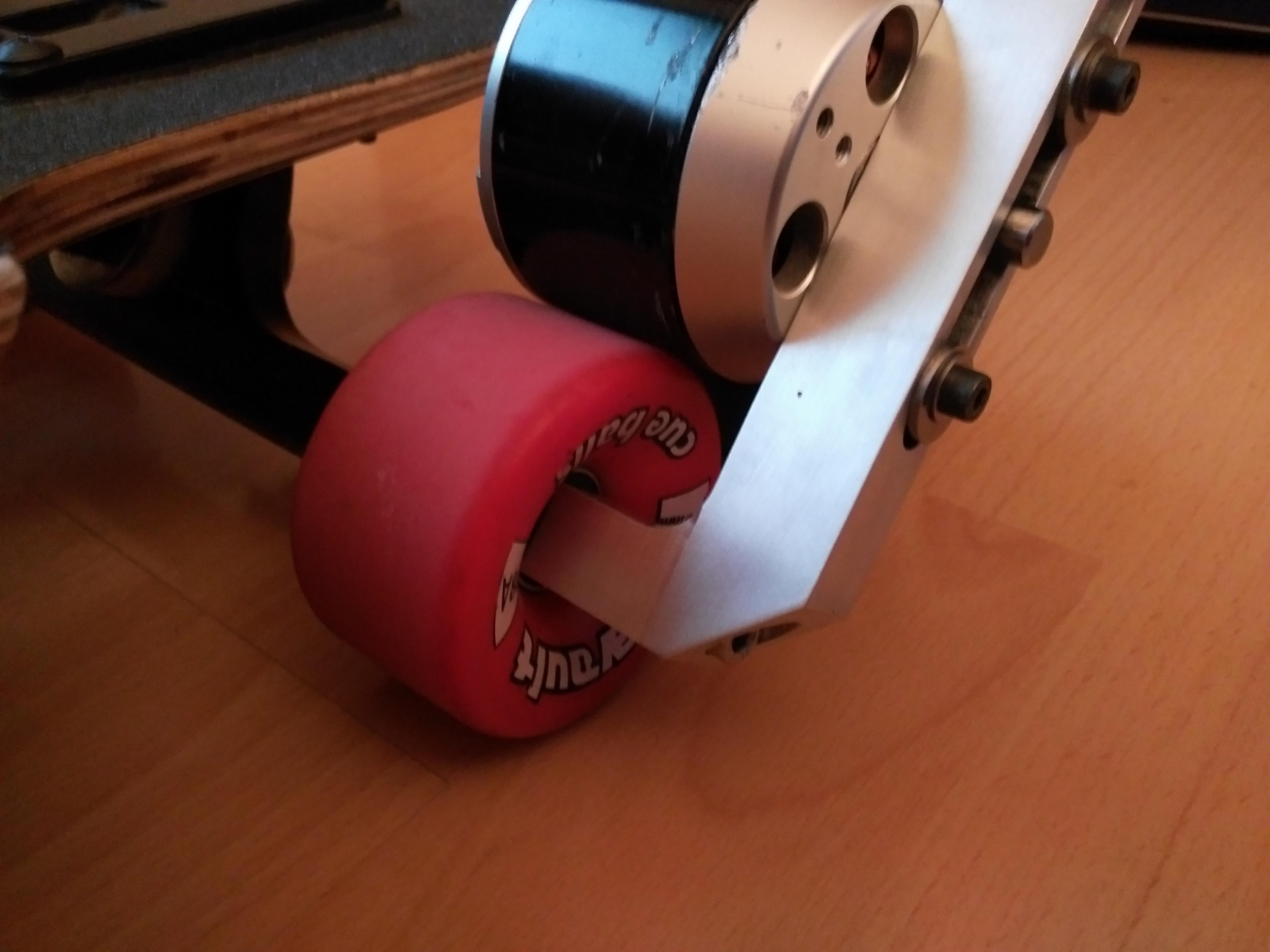
ich bin mir nicht ganz sicher, ob ich dich richtig verstehe... hier mal ein paar bilder und einer zeichnung mit meiner interpretation deines vorschlages in der zeichnung habe ich den bereich rot markiert von dem ich denke dass du meinst dass dieser weggeschliffen werden sollte, das schwarze sollte der achsstift sein, und das gelbe eine mutter bzw die normale mutter um das rad und lt deinem vorschlag auch die halterung zu fixieren. prinzipiell finde ich den vorschlag gut (wenn ich ihn so richtig verstanden habe ) das problem ist nur, dass das teil dann an der ersten biegestelle sehr dünn wäre weil dort nicht viel platz vorhanden ist. die kugellager messen 16mm, so stark ist aktuell auch die halterung. stärker ginge es mit den reifen die ich besitze auch nicht, ev könnte man an den reifen innen etwas abdrehen und so das teil dicker machen um deinen vorschlag umzusetzen oder es gibt reifen die an der stelle so viel platz lassen, weiß ich allerdings nicht und prinzipiell bin ich skeptisch ob das so zu realisieren wäre. wenn man den achsstift hingegen verlängern würde wäre genug platz vorhanden, das teil außen mit einer mutter zu befestigen, wäre eine möglichkeit die ich mir vorstellen könnte, allerdings denk ich ist es auch recht aufwendig zu schweißen und ein schönes gewinde hinzubekommen.. außerdem hat man dann permanent eine breitere achse an der stelle was beim fahren ohne motor imho ein gewisses sicherheitsrisiko mit sich bringt... allerdings wh auch nicht mehr als die montierte halterung samt motor^^ grüße u gn8
-
hey leute, gleich mal vorweg, in dem thread solls nicht um rechtliches und oder vertrieb gehen, sondern einfach um die funktionalität einer solchen motorhalterung! das konzept der kickr halterungen hat mich von anfang an fasziniert und obwohl man am markt relativ einfach die standard-motorhalterungen (mottor mittels platte an achse montieren) zu kaufen bekommt wollte ich unbedingt eine wie die von kickr. die vorteile sah ich darin das ding mit jedem reifen nutzen zu können, ich müsste auch keine reifen aufbohren wenn ich keinen befestigungsadapter für ein zahnrad hätte wie sie bei den gängigen halterungen verwendet werden und die montage schien durch einfaches aufschrauben außen an der achse wesentlich weniger "invasiv" als den reifen entfernen zu müssen und einen riehmen zwischen 2 zahnrädern zu spannen. außerdem habe ich es mir ebenso günstiger vorgestellt als die anderne halterungen die mehr komponenten benötigen. nach ein paar anfragen bei diversen firmen und einem selbst gezeichneten plan konnte ich meinen wunsch nach der halterung dann endlich umsetzen und war erstmal überglücklich dass das teil so wurde, wie ich es mir vorgestellt habe. ich habe inzwishcen 3-4 testfahrten gemacht und wurde leider mehrmals enttäuscht! bei sehr sanftem gas geben und auf der geraden straße wie bergab funktionierte das teil super und ich war begeistert, allerdings nicht sehr lange. die probleme die sich ergeben sind folgende: - die halterung wird festgedreht u mittels gegenschraube fixiert, dreht sich der motor in die normale richtung schraubt er sich quasi selbst fest und sitzt gut, will man allerdings bremsen so wird der motor vom reifen in die andere richtung gedreht und die halterung lockert sich, ergo das teil schleift am boden und muss neu fixiert werden! manchmal passierte mir das auch einfach durch den im leerlauf vom reifen aus den motor ausgeübten druck, bremsen war nicht immer nötig um die halterung zu lösen. nach diesen erkenntnissen sehe ich auch keine möglichkeit bei diesem system eine bremse nutzen können. - jede art von bodenunebenheit lässt einen zittern ob die halterung fest bleibt, oder sich lockert und anschließend samt motor wieder am boden schleift. in der city bei randsteinen u verschiedenen bodenbelägen also auch nicht zu empfehlen! - gibt man zu schnell zu viel gas reibt einen der motor den reifen ab, zwar nicht viel, aber genug um die haftung zu verlieren was dazu führt dass der motor seine wirkung verliert und man ihn sofort und immer wieder neu zum reifen spannen muss - beim bergauffahren potenziert sich diese gefahr noch um eine vielfaches und wird damit (für mich) wiederum noch unbrauchbarer - nach einigen malen sehr fest anschrauben um lockerungen zu verhindern, hat sich beim eindrehen der schraube die gegendruck auf die achse ausübt um die halterung zu fixieren das gewinde der aluhalterung verabschiedet da dieses nicht stabil genug war bzw der druck zum fixieren der halterung zu stark war aber trotzdem nicht genug um sie verlässlich zu fixieren... man könnte oben an der halterung noch einen stift anbringen durch welchen die halterung am board oder so hängen bleibt wenn sie sich lockert und sich nicht gleich soweit aufdreht dass sie mit motor am boden schleift und gefahr läuft die kabel zu beschädigen (auch passiert!). das funktioniert allerdings nicht bei jedem board und auch nicht wenn man kurven fährt und sich die position der achsen zum board verändert! ebenso könnte man die halterung wie bei anderen halterungen mit loctite an der achse festschrauben, doch damit ist der gedanke vom jederzeit schnell ab- und anmontieren des motors obsolet. ich habe viel zeit und hoffnung in das projekt gesteckt und wurde letztendlich ziemlich enttäuscht und muss mich jetzt erstmal neu einlesen was die motorhalterungen betrifft, wo man zahnräder herbekommt usw. und muss nochmal geld drauflegen um mir eine halterung zu kaufen die ich von anfang an gleich nehmen hätte sollen. ich möchte nicht jmd anderes auch so eine erfahrung macht und habe deshalb den thread erstellt, damit sich leute über die möglichen negativen auswirkungen einer solchen halterung zu informieren an die man vorher ev nicht denkt, und danach hat man unnötig zeit u energie investiert vll hat jmd so eine halterung nachgebaut die bei ihm funktioniert, ich habe es jedenfalls mit einem einfachen nachbau nicht geschafft und wüsste auch nicht wie ich die oben genannten probleme verlässlich beheben könnte, darum wird das projekt eingestellt und nicht weiterempfohlen! Danke fürs lesen! wünsche, anregungen od beschwerden nehme ich gerne an
-
hi, ich suche eine motorhalterung die ich auf meinem drop through deck nach hinten montieren kann und nicht wie standardmäßig richtung mitte des decks. die halterung sollte in der position adjustierbar sein wie die von enertion und nicht zum fix verschweißen! ich möchte nicht unbedingt aus den usa, england oder australien bestellen, vll gibts ja jmd im forum der privat welche herstellt die ich benutzen könnte, viele der standardhalterungen lassen sich leider nur richtung mitte des boardes montieren gerne auch per pn! danke schonmal
-
die frage ist ob es ein problem der fernsteuerung ist (dann kann ICH wohl nichts dran ändern) oder man das auch im bldc tool iwie anpassen kann aber motor max werd ich definitiv ein bisschen drosseln, wäre ev auch eine präventivmaßnahme für den geqünschten betrieb in 12S! hab mir den part zu ERPM durchgelesen, könnte ausführlicher sein (konstruktiver kritikpunkt ) aber reicht für meine zwecke, danke! interessant wären die anderen werte "max erpm at full brake" - was ist darunter genau zu verstehen? und "limit erpm with negative torque" bedeutet....? die seite sieht interessant aus, gib mir bitte bescheid wenn du mehr weißt!
-
naja, ich hab eigentlich nicht viel damit vor außer ihn eben so einzustellen, dass ich spannungsspitzen die so hoch sind dass der VESC drunter leidet vermeiden möchte. also zum thema foc, flashen etc. hab ich alles nicht vor. was ich aber vor habe ist ein betrieb mit 12S.. jedoch überleg ich mir das ev nochmal wenn die gefahr eines defektes wiederum größer wird ich versteh auch nicht, dass es scheinbar eher zu fehlern führen kann wenn man tests ohne last, als unter last durchführt.... ich dachte wenn der motor das ohne last nicht schafft, wird er mit last sicher überfordert? ev waren auch nur die positiven u negativen spannungsspitzen zu rapide zu weit außéinandergegangen, dann wäre das durch ausschalten der rückwärtsfunktion zu beheben, ich habs jetzt jedenfalls mal so eingestellt um hoffentlich einer möglichen fehlerquelle vorzubeugen. zum aggressiven beschleunigen hab ich im bldc tool heute gesehen, dass meine fernsteuerung bei 75% den motor zum laufen bringt (3S! 6S nach wie vor DRV error) und bei 76% läuft er bereits auf vollgas... pulsewidth einstellungen ändern nichts an dieser 1% wirkungsbreite.. kann ich dagegen etwas tun? so lässt sich die beschleunigung nur schwer regulieren
-
DRV natürlich, danke für die korrektur! ich bin mittlerweile mit dem team von esk8 in verbindung u erwarte (hoffentlich) morgen eine antwort, aber wenn du mit deiner beschreibung recht hast klingt es als wäre das mein problem und der drv muss wohl getauscht werden. habe gehofft dass es irgendeinen fehler gibt der den drv fault verursacht aber wenn das teil wirklich defekt ist ists echt ärgerlich. kannst du mir ev erklären wie es überhaupt zu dem defekt kam? waren es die kommandos der fernsteuerung mit denen der vesc nicht klar gekommen ist? sprich, sollte ich es vermeiden (auch wenn nur zu testzwecken) schnell abwechselnd von vollgas auf vollbremse bzw rückwärts herumzuschalten?! oder gibt es einstellungsmöglichkeiten im bldc tool damit weniger strom fließt damit der chip nicht überfordert wird oder irgendsowas? also ist es mit dem bldc tool nicht möglich? ich hab noch nicht herumprobiert wegen dem scheinbaren drv defekt. ich hab mich für den VESC entschieden weil ich dachte dass er einfach die besten einstellungsmöglichkeiten (für den longboardbereich bietet). ist das auch mit anderen reglern möglich oder sogar mehr?! bitte um info
-
sry für den dritten post in folge, mein problem mit dem vrd8302 fault besteht leider noch.. seltsam ist, dass mit einem akku alles normal funtkioniert, schalte ich sie in serie (so wie es gestern schon lief) dreht sich der motor nicht mehr, motor detection geht nicht und die fault suche ermittelt einen vrd8302 defekt... kann es sein dass der vrd so beschädigt ist, dass er mit niedriger spannung läuft und mit höherer nicht, oder hab ich irgendwas falsch eingestellt?! ich verstehs nicht
-
aktuell wird der motor mit 6S betrieben und ich habe, weil ich auch bergauf fahren möchte, vor ihn später mit 12S zu betreiben... theoretisch dreht der motor dann auch weiter hoch und die endgeschwindigkeit wird höher, lieg ich da richtig? da ich keine übersetzung mittels zahnräder adjustieren kann, muss also spätestens dann eine drehzahlbegrenzung eingestellt werden... wobei ich 1. die frage habe ob der motor trotzdem mit gleicher kraft, aber eben nur bis zu der begrenzten drehzahl beschleunigt, oder ob er komplett gedrosselt wird? dafür kenn ich mich mit elektronik zu wenig aus... 2. frage, ich hab bereits einen post gefunden aber da war es nicht ausfürhlich genug für mich beschrieben wo ich das genau im VESC einstellen muss?! danke schonmal nochmal
-
hallo zusammen! nach langem herumlesen, überlegen und dem schlechten gewissen - ob ich mir das projekt tatsächlich während meiner abschlussprüfungen für krankenpflege antun sollte - habe ich gestern mein erstes e-longboard fertiggestellt! an der stelle mal ein großes lob an das forum, die tutorials könnten gerade für anfänger noch ausgebaut werden, aber im prinzip habe ich nahezu alles wissen das ich mir über e-longboards angeeignet habe hier zusammentragen können! mein setup: PLANET-HOBBY JOKER 6360-12 210 KV VESC Power Switch von esk8 aktuell 2x Turnigy 3S 5000mah in serie geschalten für 6S (aus platzgründen [dropthrough-deck] nur 3S - mit überlegung 4x für 12S) Custom Motorhalterung ähnlich kickr no name 2.4ghz fernsteuerung mit fail safe ich bin zwar ein guter longboarder und recht gut in englisch, aber bei elektronik hört sichs auf und aus dem englischen bldc tool werd ich nur bedingt schlau Problem 1: Aufgrund der Motorhalterung u der direkten übertragung von motor auf reifen, ohne fixe verbindung wie einem zahnriehmen, ist das gas geben mit vorsicht zu genießen... beim bergauf-vollgas-versuch hat mir der motor den reifen abradiert^^ (naja, vll 0.5mm...) ich brauche den hebel der fernsteuerung nur 1/3 zu drücken und der motor dreht auf vollgas, auch wenn ich draufstehe beschleunigt er mir einfach zu aggressiv. auf der fernsteuerung hab ich schon alles gut eingestellt aber man kann den VESC doch sicher so programmieren dass er meinen wunsch erfüllt... ich weiß nur nicht wie. ev bei min/max pulsewidth?! bitte um hilfe! Problem 2 bedarf einer kurzen vorgeschichte: Nach der ersten testfahrt und voller euphorie wollte ich die konstruktion noch einem kurzen stresstest aussetzen (board lag verkehrt herum auf dem boden - motor u reifen drehten ohne belastung). Ich hab kurz mit dem gas herumgespielt und dann vollgas, vollbremse und wieder vollgas "gemacht", woraufhin der motor nicht mehr zum laufen zu kriegen war. er reagierte einfach nicht mehr. da ich elektronisch wie gesagt ein noob bin wusste ich erstmal nicht was zu tun ist. ich habe erstmal die failsafe funktion dafür verantwortlich vermutet und die fernsteuerung versucht neu zu binden, da ich nicht wusste ob die failsafe funktion vll bestehen blieb und ich die verbindung quasi reseten muss. hat nichts gebracht. danach VESC an den PC angeschlossen um die funktionen am bildschirm zu prüfen. motor detection failed und die fault auslese nannte mir den VRD3802 als übeltäter. voller frust in dem gedanken wegen eines unnötigen stresstestes nach der ersten erfolgreichen fahrt meinen nicht gerade billigen VESC geschrottet zu haben fing ich an zu googeln. in einem post fand ich mein "fehlverhalten" bzgl des stresstestes dann bestätigt und dachte der mikrochip sei hinüber. gut, ev nicht ganz so schlimm aber sehr ärgerlich. hab mich noch weiter daran versucht zu analysieren da der motor zwar strom bekam, aber kein gas annahm und sich auch bei der motor detection nicht drehte. auf drücken der fernsteuerung änderte sich, lt multimeter, die volteingangszahl zum motor auch nicht also ging ich wiederum von einem problem der verbindung der fernsteuerung bzw des empfängers zum VESC aus. nach weiterem googeln las ich dann, dass das 3x rote blinken beim einschalten des VESC bedeutet, dass der VRD hinüber ist. ich habe die leds vorher nciht so genau beachtet und weiß nicht ob das blinken vor meinem problem auch schon war. scheinbar war die info aber nicht korrekt.... ziemlich angepisst ging ich dann in meinen nachtdienst, mit dem ziel mich gleich am morgen danach ins forum zu schmeißen und um hilfe zu bitten bzw jmd zu finden der mir einen vrd besorgt u lötet in möglichst kurzer zeit und möglichst günstig. im hinterkopf einen forenpost der sagte, dass ein vrd8302 error code nur auf einen fehler - nicht zwingend auf defekt - hinweisen würde. der nächste morgen ist da (ich bin seit ewig wach und deshalb überdreht genug um so einen roman zu schreiben). ich kam nach hause, dachte mir ich probiers einfach mal wieder und schau ob sich das problem nicht doch von geisterhand gelöst hat, und so wars dann auch ich versteh nicht wieso aber ich hab alles stehen lassen und 12std später funktionierte es wieder wie von anfang an...?! Jetzt wirklich Problem 2: mein kleiner stresstest inkl anschließender fehlfunktion hat mir doch einen ziemlichen schock verpasst... wie kann ich sowas in zukunft vermeiden? gibt es eine funktion oder einen wert einzustellen im bldc tool, der mich vor solchen fehlern bewahrt? als laie hab ich mich (leider) dumm mit gas und bremse gespielt und dass davon gleich der VESC kaputtgehen könnte macht mir nun sorgen! rückwärts fahren brauche ich eigentlich nicht, bremsfunktion wäre aber nett... damit kann ich schonmal verhindern den motor schnell vor u gleich schnell zurück drehen zu lassen - hoffentlich eine präventivmaßnahme falls sowas wie mein stresstest mal zufällig passiert, aus hektik oder so. ich konnte es noch nicht testen doch vermute ich "current no reverse with brake" bedeutet dass ich eine bremse habe, oder? sorry für diesen roman u dass meine fragen so verstreut sind, kann das nach ner mütze schlaf gern nochmal zusammenfassen falls nicht jeder so lesefreudig ist und ich dadurch weniger hilfe bekomme... für alle dies gelesen haben u mir helfen, danke schonmal im voraus!
-
Hey Pizzabote mich würde deine motorhalterung sehr interessieren. ich möchte selbst unbedingt eine halterung wie in dem von dir angefügten video und bin nohc am überlegen wie das am besten/einfachsten zu realisieren ist. kannst du mir ev fotos und tipps geben? da der post schon länger zurück liegt, kannst du wohl auch schon sagen ob das ganze entsprechend gut funktioniert und weiterzuempfehlen ist, oder ob man besser zu den üblichen halterungen (aliendrive zB) mit zahnrädern greifen sollte?! ich hoffe du siehst den post (man kann hier scheinbar keine privaten nachrichten schicken) und kannst mir etwas weiterhelfen lg chris