sch_ch1
-
Gesamte Inhalte
39 -
Benutzer seit
-
Letzter Besuch
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von sch_ch1
-
nunchuck verbindungsprobleme beim beschleunigen
sch_ch1 antwortete auf sch_ch1's Thema in: Elektro-Skateboard Werkstatt
guter einwand, danke dafür! habs wieder mit 6S versucht und es hat sich nichts verändert. echt seltsam, ich dachte echt dass es daran liegt. im jahr zuvor hatte ich wenig probleme damit, dann ein paar monate stehen gelassen, heuer neuer akku rein und seitdem diese heftigen, permanenten verbindungsabrisse. jetzt bin ich widerum ratlos woran das liegen kann... hatte im letzten jahr vergleichsweise sehr wenig verbindungsprobleme notfalls muss ich wohl auf 2.4ghz wechseln, mir gefällt der nunchuck (joystick u form) aber eig sehr und ich hab 2 davon, wäre etwas schade wenn ich die nun nicht mehr verwenden kann -
nunchuck verbindungsprobleme beim beschleunigen
sch_ch1 hat ein Thema erstellt in: Elektro-Skateboard Werkstatt
ich hab diesen sommer von nem 6S akku auf 10S gewechselt und hab seither ständig verbindungsabrisse beim beschleunigen. hatte vorher nen nyko kama mit wiiceiver/arduino, inzwischen den arduino entfernt weil defekt und den nyko empfänger direkt an den vesc angeschlossen. verändert hat das leider nichts. mit ner 2.4ghz remote funktioniert alles wunderbar, aber mit nunchuck bleibt mit seit dem wechsel auf 10S immer das gas hängen (bzw. reißt die verbindung ab und wg timeout settings wird noch ne sekunde lang weiter beschleunigt) das passiert eigentlich immer sobald ich „hart“ gas gebe, dafür reicht es schon wenn ich den stick nur halb nach vorn drücke, wenn ich das in einem ruck mache blinkt der nunchuck sofort weil die verbindung weg ist. bei vollgas sowieso. beschleunige ich langsam, funktioniert es. allerdings ist das zb beim bergauf fahren gar nicht möglich so wenig zu beschleunigen dass ich den berg hoch komme und die verbindung dabei hält. extrem lästig und kam wie gesagt bei 6S nicht vor. iwo muss also zu viel strom fließen, was den empfänger stört, so erkläre ich als laie mir das problem. und wie gesagt, mit ner 2.4ghz fernbedienung hab ich keinerlei probleme. hab auch schon verschiedene positionen im akkucase vesucht, ebenso den empfänger oben aufs board zu legen, macht aber leider keinen unterschied. ich hab leider keine ahnung was ich machen kann. vll im vesc tool einen od mehrere werte reduzieren?! wäre super wenn mir da wer helfen kann -
arduino + wiiceiver software ändern (austin david v1 auf v2)
sch_ch1 antwortete auf sch_ch1's Thema in: Elektro-Skateboard Werkstatt
thema kann geschlossen werden. hab den arduino inzwischen entfernt und den nunchuck receiver direkt an den vesc gehängt. funktioniert, also hat der arduino nen defekt. -
arduino + wiiceiver software ändern (austin david v1 auf v2)
sch_ch1 antwortete auf sch_ch1's Thema in: Elektro-Skateboard Werkstatt
update: ich hab wohl den arduino od den wiiceiver geschrottet durchs falsche anschließen oder so... is mir auch vor 2 jahren mit dem wiiceiver passiert 🙄 diesmal sieht der wiiceiver allerdings funktionell aus. er blinkt beim einschalten, leuchtet bei sync und bei eingabe durchs nunchuck. der arduino eig genauso, nur der vesc zeigt kein zeichen, dass er ein signal bekommen würde. interessanterweise kann ich im bldc tool die pulsewidth anzeigen lassen, jedoch ohne die grüne leiste, bekommenur die % von gas u bremse angezeigt. nach test an nem anderen esc (und test eines 2.4ghz receivers am vesc) bin ich sicher, dass entweder der arduino od der wiiceiver was hat. denke eher der arduino aber kenne mich zu wenig aus um das iwie überprüfen zu können. kann mir da ev wer helfen? arduino ersetzen würd ich mir wohl antun, wenn ich sicher sein kann dass der das prob ist. wenns der wiiceiver ist rüst ich um auf ne "normale" 2.4ghz remote! is mir zu mühsam bei fehlern oder aussetzern immer wieder nach passenden nunchucks zu suchen u die teuer von US importieren zu lassen -.- -
benutze auch hdt 5! seit 2 jahren im einsatz und eig keine probleme. das einzige mal, wo mir einer gerissen ist, war nachdem ich nen randstein/bordstein recht brutal hoch bin^^ dürfte zuerst verrutscht gewesen sein, weil plötzlich ein komisches noch nie zuvor gehörtes quietschgeräusch zu hören war, bin noch 2-3m weiter gefahren - bergauf, dann war er hinüber. beim "normalen" fahren allerdings seit gut 500km keine probleme gehabt!
-
arduino + wiiceiver software ändern (austin david v1 auf v2)
sch_ch1 antwortete auf sch_ch1's Thema in: Elektro-Skateboard Werkstatt
sorry für dreifach-post... habs mittlerweile geschafft die software zu ändern. sowohl das test blink programm draufgespielt, als auch V2 und dann wieder V1. hochladen funktioniert. die leuchten am arduino und wiiceiver sehen auch gut aus, auch ne verbindung zum nunchuck bekomm ich ganz normal hin, aber der motor macht nix. jetzt steh ich wieder an und hab keine ahnung wo der fehler liegt. die grüne led am arduino leuchtet schneller wenn ich gas gebe, so wie es in der anleitung beschrieben wird. allerdings dreht sich der motor nicht 😕 hab seit gestern eig nix gemacht außer am arduino rumgespielt. vesc unverändert. edit: (scheinbar geht edit doch, vll nur wenn man innerhalb 10-15min editieren mag?! seltsam jedenfalls^^) vesc (4.12) grad ans bldc tool angeschlossen. keine faults. wirkt alles normal. nunchuck reagiert wenn ich auf display pulsewidth geh, und wenn ich auf der tastatur die pfeiltasten drücke reagiert der motor auch wie gewohnt. ich hab grad echt keine ahnung wo der fehler liegt -
arduino + wiiceiver software ändern (austin david v1 auf v2)
sch_ch1 antwortete auf sch_ch1's Thema in: Elektro-Skateboard Werkstatt
kann man hier nicht mehr editieren?! nachtrag: bei den boardeinstellungen bin ich mir leider auch nicht mehr ganz sicher... ich glaube es ist ein pro mini, (328p, 3.3v, 8mhz - die werte in klammer hatte ich auch nem zettel notiert). und richtige datei hin oder her, ich schaffs nichtmal das beispiel "blinker" hochzuladen, das in allen tutorials vorgeschlagen wird :/ -
arduino + wiiceiver software ändern (austin david v1 auf v2)
sch_ch1 hat ein Thema erstellt in: Elektro-Skateboard Werkstatt
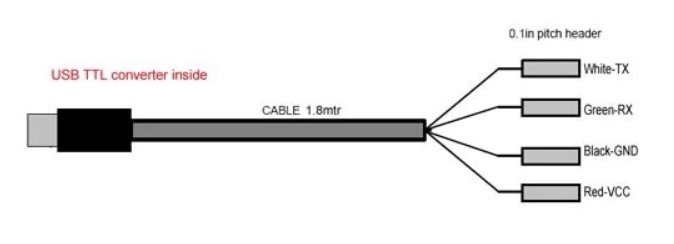
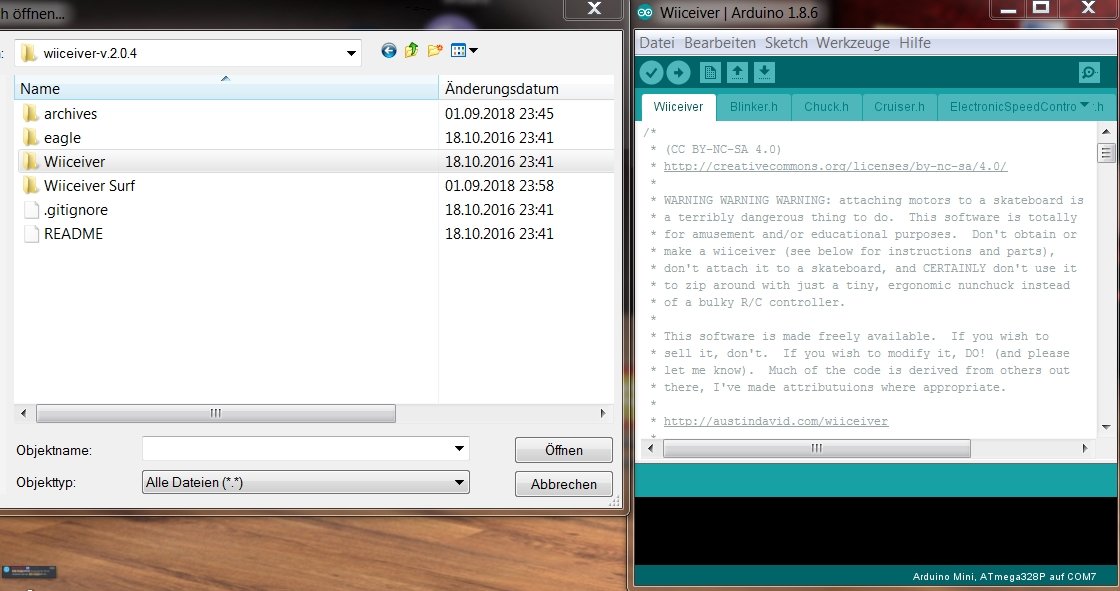
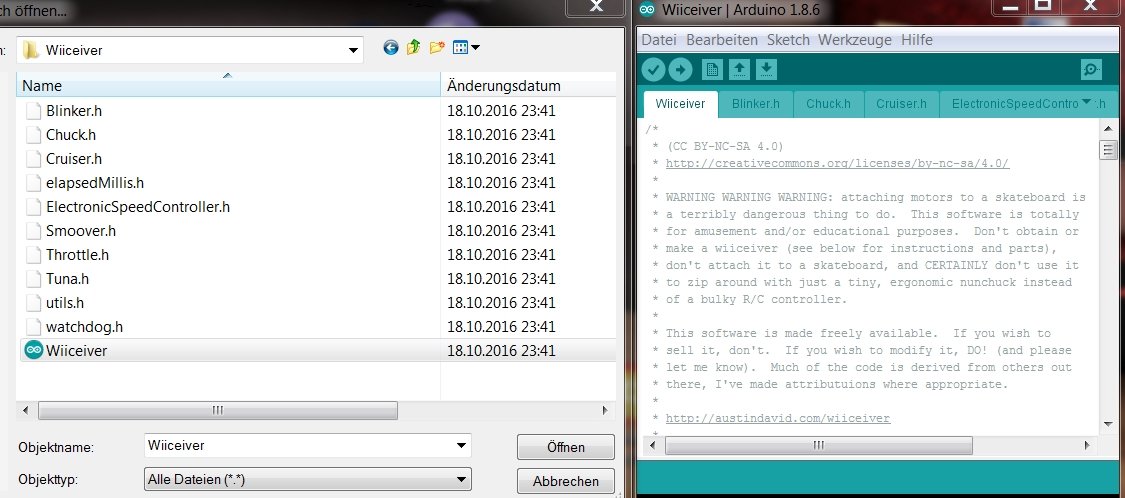
hy leute, nach langer abwesenheit hab ich mir diesen sommer nen neuen akku zugelegt (von 6S auf 10S). leider lief das board (nach anpassung der voltage limits) nicht mehr ganz so fehlerfrei wie die letzten 1-2 jahre. (verbindungsabbrüche, gas bleibt hängen, vesc setzt aus beim bergauf fahren) nun möcht ich das teil mal komplett neu einstellen bzgl vesc und wiiceiver, hab aber vieles vergessen weil ich mich so lange nicht mit der software beschäftigt hab und brauche nun hilfe! die probleme werden nach und nach, und wohl in seperaten threads behandelt, aber das erste das ich mal machen möchte ist die wiiceiver software von austin david, am arduino , von V1 auf V2 zu ändern. sollte theoretisch in 1min erledigt sein, wenn man weiß wie, allerdings schaff ichs einfach nicht. richtig angeschlossen hab ich den arduino glaub ich, dann software öffnen und beim hochladen beim compile den reset knopf halten. soweit weiß ich noch. allerdings bekomm ich immer ne fehlermeldung und weiß nicht worans genau liegt. ich weiß leider nichtmal mehr was genau die richtige datei war, die ich in den arduino laden muss. wäre super wenn mir da wer weiterhelfen kann! anbei ein paar bilder: 1. bild: arduino an pc angeschlossen 2. bild: beschreibund des verwendeten kabels 3. bild: ordner mit der software die ich zum hochladen ausgewählt habe 4. bild: die datei die ich zum hochladen ausgewählt habe
-
danke für die infos! ich habs mir inzwischen auch durchgelesen und gemerkt, dass der letzte post von vedder recht "lange" her ist... zu meinem drv: glücklicherweise konnte ich in meinem weiteren freundeskreis jmd gefunden der smd's löten kann und 2 drv chips bekomm ich auch demnächst.. unter den umständen leb ich wohl mit den potentiellen drv faults und degradiere den vesc zum ersatz sobald 6.0 verfügbar ist!
-
Danke euch, hab noch von anderer stelle den hinweis über die gewollten "brücken" erhalten. allerdings ist/war bei mir ein derart großer lötpatzen bei der einen verbindung und bei der anderen sehe ich keine verbindung. da der vesc aber schon lief müsste das eh korrekt gewesen sein, und so heiß wurde er nicht dass das verronnen ist... hab mich inzwischen selbst gespielt und nun muss der drv sowieso neu verlötet werden^^ bin aber immer noch auf der suche jmd in Ö oder wien zu finden der das kann @barney: ich dachte vesc 5.0 ist noch nichtmal fertig und da sollte bereits ein anderer chip als ein drv verbaut werden... kannst du mir da bitte ein kurzes update vom stand der dinge geben damit ich nicht die threads durchforsten muss?! und wann sollten erste versionen dieses ominösen vesc's in etwa fertig sein bzw ab wnan kann man einen erwerben?
-
... wie lange war ich jetzt doch noch begeistert und zufrieden mit dem vesc... 3 wochen?! der DRV ist schon wieder hinüber und ich bins langsam leid so viel geld zu investieren für den "besten controller".. die einstellungsmöglichkeiten und hardware ließ mich nach dem ersten DRV noch einen versuch wagen aber nun wurde ich wieder enttäuscht. bis auf dieses problem mit dem vollgas (war/ist ein ABS fault dem ich auf den grund gehen wollte) war ich wirklich zufrieden mit dem vesc... 25km euphorisches cruisen konnte ich inzwischen genießen, habe bei meiner fahrt nichts anders gemacht wie bei den 3x davor und diesmal ging mir beim beschleunigen der drv kaputt. kennt wer zufällig jmd in österreich oder wien der den reparieren kann bzw einen solchen chip löten kann? nochmal schick ich ihn nicht für 50€ nach deutschland, sonst warens 250€ für einen ESC der mir aus unbekannten gründen immer wieder kaputt gehen könnte. vorerst leg ich den vesc aber wiedermal zur seite, freue mich immerhin einen "normalen" esc als ersatz zuhaus zu haben und ärgere mich widerum den nicht mit dem nunchuk verwenden zu können den ich für den vesc gekauft hab "weils so einfach ging"... EDIT: hab mir das teil nach dem ersten frust mal genauer angesehen und gemerkt, dass sich 2 pins durch "verronnenes" lötzinn verbunden haben. theoretisch könnte der fehler alsobehoben werden, wenn man das überflüssige zinn entfernt... ich hab allerdings keine ahnung wie man das (am besten) macht... notfalls muss ich ein paar firmen abklappern und hoffen dass sich jmd findet der sich der sache annimmt
-
hab die runtastic bike app ausprobiert, fand die geo tracking app aber doch besser weil es ein schönes geschwindigkeitsdiagramm aufzeichnet das sich bezogen auf die dauer oder die distanz anzeigen lässt. die runtastic hat mir mit den etappen einfach nicht genug details verraten, ob die strecke aufgezeichnet wird weiß ich jetzt gar nicht mehr (habs schon wieder deinstalliert), die geo tracking zeichnet die strecke jedenfalls an. ... für die wenigen daten die wir aus solchen apps "verwerten" können find ich die geo tracking besser/interessanter/detailreicher. schaut sie euch an u entscheidet selbst, ich denke die runtastic ist weit bekannter, ich find die andere jedoch besser u möchte das deshalb weitervermitteln
-
mein nunchuk ist erfolgreich in betrieb gegangen und ich grab den thread mal wieder aus updates inzwischen: übersetzung von 12:36 auf 15:36 akku von 6S 5A auf 9S 5A standard PPM funke zu kama nunchuk die probs mit dem batteriedisplay bestehen interessanterweise bei 9S nicht.. bei 6S hingegen schon. mein display dürfte allerdings sowieo irgendwie falsch programmiert sein da es bei den einstellungen der zellen nur irgendwelche fragmente von buchstaben u zahlen anzeigt und ich jedes mal alle durchtesten muss um auf die korrekte einstellung zu kommen. das prob war schon von anfang an, da mir aber zeitgleich der drv kaputt ging hab ich das ignoriert - werd wohl weiterhin damit leben müssen was solls eXo: die probs mit der ppm konnte ich nicht lösen, insofern hab ich für dich da jetzt keine news dabei - außer dass es, wie von barney (oder wars dude?!) beschrieben, beim nunchuk nicht mehr vorkommt! mit dem nunchuk hab ich ein schönes progressives "drehzahlband" über den ganzen hebelweg... einzig: kurz vor vollgas wirds etwas aggressiver... und neues problem: der vesc hört auf zu beschleunigen (respektive ein signal anzunehmen) wenn ich vollgas drücke. egal ob der hebel langsam oder schnell gedrückt wird, ab ca 90% des gedrückten hebelweges regelt irgendetwas ab. das problem hatte ich bei ppm nicht und es ist recht gefährlich wenn man sich beim beschleunigen ins board stemmt und plötzlich der schub aufhört. hat jmd ne idee was ich da umstellen kann oder woran das liegt? mir fällt gerade noch ein dass es nicht zwingend am nunchuk liegen muss, eig ists wahrscheinlicher dass es an den 9S liegt wenn ich so nachdenke. aber was ich ändern könnte um das zu testen weiß ich leider nicht: eine überlegung wäre den wert "max duty cycle mal von 0.95 auf 1 zu stellen?! is aber nur sehr sehr grobe theorie. es hieß doch, dass es besser ist einen motor mit mehr spannung zu betreiben (9S besser als 6S) da die spannungsspitzen dann weniger werden, darum nehm ich mal an dass es an den motor A limits nicht liegen kann, ist aber ebenfalls nur theorie. hoffe es hat jmd ne idee dazu. so long, roll on
-
hab jetzt 3x die app "geo tracker" genutzt und war ebenfalls zufrieden, werd aber beim nächsten mal die runtastic testen, dachte die gibts nur fürs laufen - thx
-
bitte um ideen zu meinem problem mit der ladestandanzeige, habe sie genau wie im bild beschrieben verkabelt, nur mit dem problem, dass sich die anzeige nicht mit dem on/off schalter vom board einschalten lässt... ich muss, nachdem ich das board angeschaltet habe, das kabel zum anzeigedisplay neu einstecken damit es funktioniert. habe iwo im forum auch schon schaltpläne gesehen wo +/- von der ladeanzeige an verschiedenen positionen angelötet wurden. da gibts doch auch beim auto mit dem radio ab und an so ein dauerplus problem das ich mit meinem vergleiche... hab aber zu wenig ahnung von der elektrik. hier noch der link zum bild: http://www.elektro-skateboard.de/forum/attachments/elektro-skateboard-werkstatt-48/verkabelung-aps-mit-eigenbau-2416d1442602643-stromlaufplanii.jpg
-
interessant, ich werde berichten sobald mein nunchuk angekommen und getestet wurde! schade dass sich dieses "linearitätsproblem" der gasannahme nicht ändern lässt. Durch das (bei mir unkompliziert funktionierende) foc, manchen rumspielen am startup und tlw. intensives beschäftigen mit den möglichkeiten im bldc tool finde ich langsam doch gefallen am vesc. immerhin funktioniert er nach dem ersten drv defekt soweit ganz gut. dann missbrauche ich den thread in der zwischenzeit für ne fragen zum thema verkabelung das problem: meine akkustandanzeige (von esk8) funktioniert leider nicht mit dem einschaltknopf vom board, ich muss das baord immer zuerst einschalten und die anzeige neu anstecken damit sie stom bekommt bzw funktioniert. die kabel der anzeige habe ich mit dem ende des power spark verlötet, das mit dem vesc verbunden wird. habe im netz verschiedene schaltpläne zur verkabelung gesehen, aber dachte meine methode sollte funktionieren?!
-
Wäre auch für mich interessant! Hab exo eine pn geschrieben ob er schon andere fernsteuerungen versucht hat, aber hab noch keine antwort. kann aber auch sein dass es keinen unterschied macht und es generell am ppm signal liegt. da ich, wie vorher geschrieben, gerne eine cruise controle hätte u der vesc den (kama) nunchuk so unkompliziert nutzen lässt hab ich erst einen geordert, bis der ankommt und ich testen kann werden aber ein paar wochen vergehen. inzwischen hatte ich wenig zeit zum fahren, aber viel zum surfen, hab mich kurzerhand entschlossen FOC auszutesten. die warnungen es zu versuchen und ein erst defekter drv lagen mir zwar schwer im magen, aber nach dem tut von torque auf yt ( ) dacht ich was solls, es sind nur ein paar klicks, keine werte verändern oder sonstiges und wenn das teil kaputt wird dann soll es so sein. habs also wie im video beschrieben auf foc umgestellt (2x measure, 1x calculate, 2x apply und write config) und es funktioniert(!) und obwohl die beschleunigung insgesamt nicht weniger aggressiv ist, läuft der motor insgesamt runder, er dreht smoother runter u rauf, was das geschwindigkeit halten auch etwas angenehmer macht. wäre mal ne kleine verbesserung, u leiser ist das ganze teil auch
-
Danke für den input, hab ich aber bereits versucht, und auch nahezu jedes yt-video zum thema vesc programming (inkl. dem von dir verlinkten) bereits gesehen... vergebens schau dir mal die threads von "bruce lee", "eXo" und einer wars glaub ich noch im forum an, die beschreiben quasi das gleiche problem und konnten es ebenso nicht lösen. woran es liegt weiß man leider auch nicht, in diesem forum sind wir unter den ganzen vesc-usern 4-5 die dieses problem haben soweit ich weiß. ich muss schon sagen, man kann sich daran gewöhnen, aber am "angenehmsten" fahren ist leider unter vollgas (ergibt bei mir knapp 25km/h u geht nur auf der donauinsel in wien so schön^^). weil man den finger niemals so ruhig am hebel halten kann als dass der motor bei dieser empfindlichkeit nicht rauf- oder runterdrehen würde. ein paar einstellungen hab ich noch zum testen, aber ich glaube nicht dass diese mein problem lösen werden! alternativlösung wäre eine fernsteuerung mit cruise controle, löst das beschleunigungsproblem u ansprechverhalten wahrscheinlich nicht, aber geschwindigkeit halten wird damit dann möglich, aktuell geht das nicht wirklich wiel der motor wie gesagt zu empfindlich auf die fernsteuerung reagiert
-
Danke dir, das tablet geht auf jeden fall mit zur nächsten ausfahrt, ebenso wie der hw esc^^ sag mal, hast du dich schon mal in der app configuration mit den soft erpm limits beschäftigt bzw ausgetestet? ich muss nochmal nachschlagen wie man die erpm berechnet, doch theoretisch wird die beschleunigung mittels diesem wert bei start gedämpft und bei end komplett eingestellt. was, wenn man ein open end lässt, aber den start auf sagen wir mal 10km/h (natürlich in erpm umgerechnet) einstellt? unten lässt sich die beschleunigung ja noch recht gut handeln, aber bei 10-20km/h sind die plötzlichen ruckler eben ziemlich böse. theoretisch könnte man so die beschleunigung drosseln, auch der vesc so sensibel auf die funke reagiert...
-
hab meine halterung heut bekommen und war, spät aber doch, noch aus zu ner testfahrt. ich bin mal mit den standardeinstellungen vom VESC eine runde gefahren, nur der bremswert war (angenehm) angepasst. hab mich mit dem deadband usw. zuhaus noch gespielt, darum schreib ich jetzt kurz noch zur testfahrt, nach gefühlten 5-7km ließ mich der VESC die geschwindigkeit nicht mehr halten (hebel kaum bewegt), es gab zwischendurch immer wieder kurze ruckler wo er teils nicht reagierte, teils für ein paar milisek. hochgedreht hat, das ging so einen halben km bis er kaum mehr gas annahm und ich stehen blieb. neu einschalten hat nichts gebracht, testhalber mal von 6S auf 3S umgehängt und es lief alles wunderbar... ich war schon sauer, dass ich den gleichen dvr-defekt ev schon wieder habe u bin nach hause gepusht. zuhaus lief wieder alles wie gewohnt?! vesc läuft im bldc tool ohne fehler und ich hab keine ahnung was los war. wie kann ich das das nächste mal rausfinden? vesc laufen lassen, an das bldc tool hängen und fehlerauslese machen? soweit die theorie... ich hab mich jz noch ein wenig mit den fernsteuerungseinstellungen gespielt, da die beschleunigung auch beim fahren so extrem war wie im trockentest, sprich es reicht aus den gashebel 1-2mm zu bewegen um von 0 auf vollgas zu kommen. mit sehr viel gefühl u übung gehts halbwegs, aber es könnte anders aussehen! der deadband wert war in der tat etwas hoch, hab den beim allerersten versuch schon verändert damit diese aggressive beschleunigung erst später kommt u man den hebel vorsichtiger betätigt, hab ihn wieder etwas zurückgestellt, hat aber nichts an der beschleunigung geändert, sie kommt früher aber in gleichem maße umgestellt auf duty cycle läuft das zumindest im trockentest (gespannter keilriehmen) so wie ich mir das vorstelle, nur dass es keinen leerlauf gibt und ich kein rückwärts möchte duty cycle no reverse hat mir mit angeschlossenem motoer gleich nen schrecken versetzt als der motor hochgedreht hat, musste den hebel der fernbedienung auf -50 (komplett zurück) drücken damit der motor steht. hab die pulsewidth dann soweit adjustiert dass ich in der 0-position wieder einen ruhigen motor habe und die beschleunigung läuft genau wie beim normalen duty cycle, rückwärts gibts auch keines... aber leerlauf auch keinen, das ist das problem, darum ist der modus nicht nutzbar für mich, jedes mal bremse wenn ich vom gas gehe ist kein spaß! jetzt meine frage: kann ich an den motorwerten noch irgendwas verändern (genauso wie man zb die bremsstärke ändern kann), sodass er im duty cycle auf 0 position keinen strom bekommt und leer läuft? dass er aber trotzdem eine bremse hat wenn ich den hebel ins negative bewege?! ich denke das wäre momentan die beste lösung für mich. im current mode reagiert mir der motor auf die fernsteuerung einfach zu aggressiv u ich schaffs nicht das zu ändern, gesamtmotorleistung will ich auch nicht drosseln. ich hoffe auf hilfe!
-
von dem was ich in deinem thread gelesen habe kann ich sagen, dass ich wohl nicht ganz das gleiche problem haben (klingt aber ähnlich), und dass du dich wohl bereits weit mehr mit dem VESC gespielt hast als ich es vermutlich tun werde, aber sollte ich erfolg haben werde ich berichten. ich habe noch einiges zu lesen, doch bis meinem aktuellen wissensstand nach (tipp aus dem thread ) ist es nur möglich die gesamtleistung des motors zu drosseln um eine sanftere beschleunigung zu ermöglichen. da ich aber auch bergauf fahren möchte kommt diese option nicht für mich in frage. mal sehen ob ich das iwie hinbekomme, sanftere beschleunigung und "besser/proportioneller" über die fernbedienung regulierbar sind die momentanen ziele. meine motorhalterung wurde nach 10 tagen lieferverzögerung nun endlich verschickt und es macht für mich wenig sinn und spaß das ganze nur im trockenen zu testen, darum wird das projekt ruhen bis ende der woche - danach ist mein urlaub/ferien allerdings vorbei u die ich muss schauen wie ich zeitlich dazu komme.
-
:skep:... einer der wenigen werte dieser sektion den ich bisher ausgeblendet habe... thx
-
die beschreibung von beosila war für mich eher zu verstehen aber ich danke euch für diese erkenntnisse! hab ich nicht gewusst und find ich interessant... mir ist aufgefallen dass die ESCs den motor unterschiedlich ansteuern müssen da es, gerade wenn der motor schon läuft und man zwischendurch ohne last beschleunigt, spürbare ruckler im ansprechverhalten beim hw esc gibt, das untermauert die aussage dass der vesc "auf drehmoment geht". den tipp mit dem duty cycle werd ich ev morgen mal testen, danke auch dafür! mit "deadband" meinst du den toten weg den der hebel hat? das wäre aber mittels pulsewidth zu adjustieren, oder?! das hab ich nämlich bereits versucht, wenn ich allerdings nur rückwärts - ohne bremse - nutze könnte ich das nochmal anpassen. werd ich versuchen!
-
hey dude, die letzten versuche hab ich aufgrund fehlender (funktionstüchtiger) motorhalterung ohne last durchgeführt, ich kann mich aber noch erinnern, bzw. habe ich das problem der "aggressiven beschleunigung" schon im anfangspost geschildert nachdem ich meine ersten fahrversuche (mit last) mit dem VESC hinter mir hatte. es war nicht ganz so schlimm wie ohne last - stimmt schon, jedoch ist die beschleunigung beim hobbywing schön proportional je nach druck auf den hebel der fernbedienung, und beim VESC ist der "reaktionsweg" (den weg wieweit ich den hebel der funke drücken muss dass der motor reagiert) der funke viel geringer... zum vergleich habe ich mal, ohne last, 2 vergleichsvideos gemacht wo trotzdem schön zu erkennen ist was ich meine. das bild ist leider nicht sehr scharf und der ton recht leise, aber man kanns anhand der motorgeräusche recht gut hören, wie der HW ESC auf die funke reagiert und wie der VESC reagiert. hw esc vesc
-
deine antwort lässt nicht gerade euphorie in mir hochsteigen hab mir deinen thread durchgelesen und bin wieder ein stück mehr enttäuscht vom vesc... ich kenn mihc wenig mit elektronik aus, doch esc's gibt es doch seit geschätzt 20 jahren, der vesc wurde sogar eigens für unsere zwecke generiert und von null aufgebaut und programmiert - wieso kennt niemand den grund für ein derartiges problem, geschweigedenn einen lösungsansatz? schade... dieses unerwünschte bremsverhalten im leerlauf von dem ich in deinem thread (eXo) gelesen habe war bei mir übrigens beim vesc nie der fall, beim hobbywing hingegen schon, das konnte ich dann auch fast beheben durch einstellung des mittleren drehschalters an meiner fernbedienung, beim vesc war ich da von anfang an zufrieden, wenn da dieses enorme beschleunigungsverhalten nicht wäre das selbst vorsichtiges fahren nicht ungefährlich macht