

elkick
-
Gesamte Inhalte
684 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
1
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Beiträge erstellt von elkick
-
-
Also wenn du dich erst mal daran gewöhnen willst, ist es mit der 1.14 einfacher, da die Beschreibung im Wiki etwas detaillierter ist.
Die FW 2.3 oder 2.4 ist aber soweit stabil und kann verwendet werden. Einfach darauf achten dass du das so machst wie ich oben beschrieben habe, falls Fehler auftreten, dann kann nix schief gehen. Ich gehe davon aus, dass das mit dem BLDC Tool V2.5 dann nicht mehr passiert.
Für FOC einfach den Schritten im VESC-Thread folgen.
-
.
Tool runter geladen und geöffnet auf connect geklickt> dann steht unten kurz connectet> dann no Firmware read response in rot > und dann not connectet.
Das ist ein generelles Problem mit dem neuen BLDC-Tool unter V2.x, das liegt nicht am VESC. Lösung:
-
VESC via USB mit dem Rechner verbinden
- BLDC Tool starten
- Tab Firmware, "choose" -> richtige Firmware aussuchen: /mc_config_&_FW/mc_config_&_FW/firmwares 1.14/hw_410/default.bin
- auf "upload" klicken -> jetzt erscheint genau dein Fehler "disconnected"
- nichts verändern, VESC kurz vom Strom trennen und wieder verbinden, "connect" klicken, "upload" klicken, fertig
Wenn du das BLDC-Tool V1.14 startest, wird die FW auch ohne update erkannt. Jeder VESC der raus geht ist einzeln getestet und hat die FW drauf.
Alternative zu oben:
Update auf die FW 2.4 unter BLDC-Tool 1.14 durchführen, dann besteht der "disconnect"-Fehler nicht. Danach einfach das BLDC-Tool V2.4 starten und den VESC mit der FW 2.4 benutzen.
-
VESC via USB mit dem Rechner verbinden
-
Naja bisher hab ich ja noch nichts mit dem VESC gemacht! Was heist Hochstrom bis wie viel muss es denn gehen und wo außer Alien bekomm ich das denn jetzt wieder her?
So langsam machts keinen Spaß mehr!
Ich mache hier keine Werbung, daher habe ich Alien genannt, Alternativen gern per PN. Der Schalter sollte soviel ab können wie dein Akku vom Motor zieht. Kannst aber auch einfach einen XT90 nehmen mit integriertem Anti-Spark-Schutz und umbauen. Und bitte die Motorkabel mit Schrupfschlauch (oder irgendwas anderem isolieren), wenn Strom auf den VESC geht und die Dinger sich berühren, gibt's einen Kurzen.
-
Das ist nicht gut, damit zerschießt du die Elkos am VESC!
Du brauchst einen hochstromfähigen Switch, wie z.b. der von Alien, DiY oder den aus dem Wiki.
-
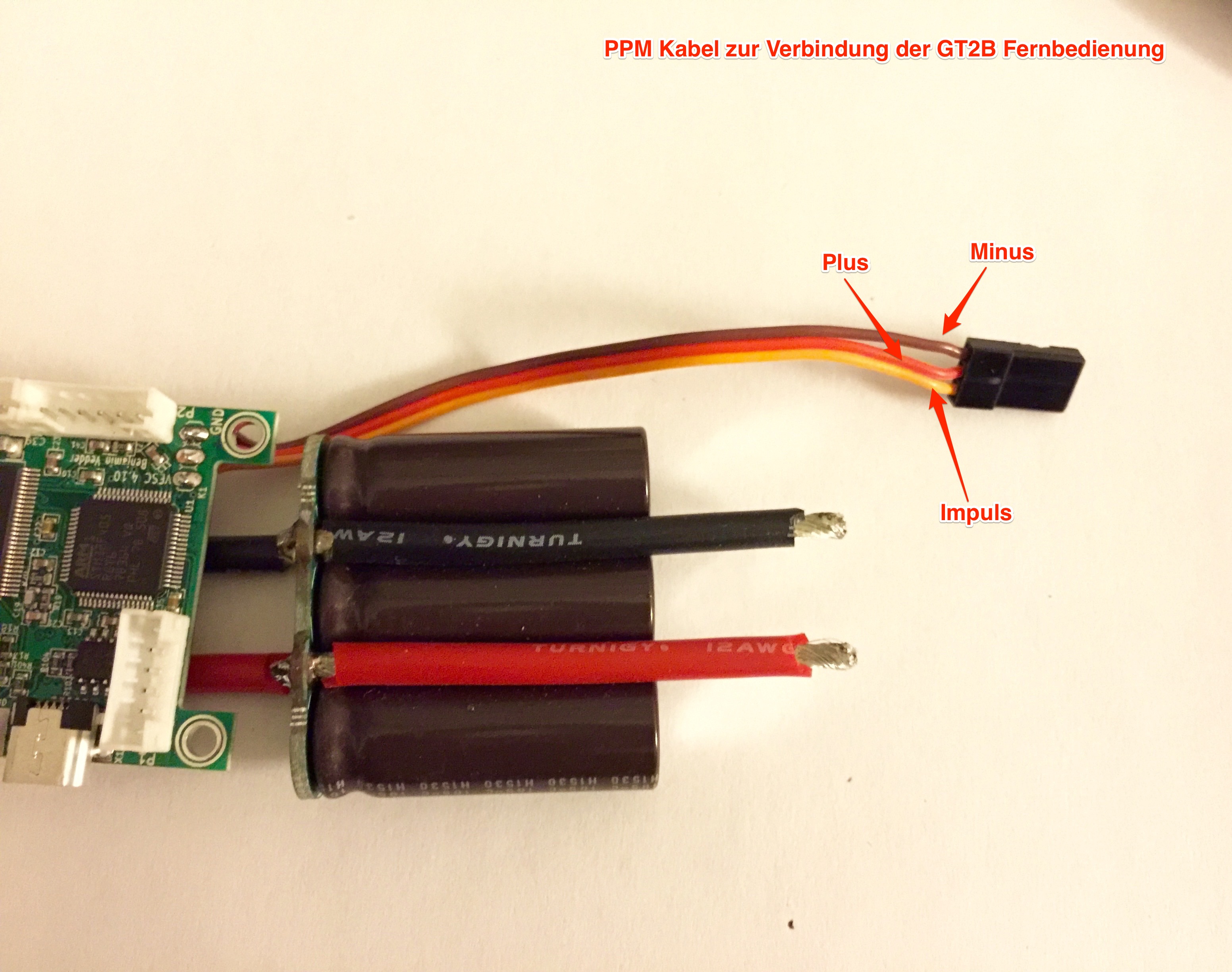
Aber gerne doch! Bitte Gt2B Receiver mit Stecker des Servokabels verbinden.

-
 2
2
-
-
Der Update gelingt immer, wenn der VESC in Ordnung ist. Dazu braucht keiner ein StLinkV2 und Programmierkenntnisse. Und schon gar nicht UART.
-
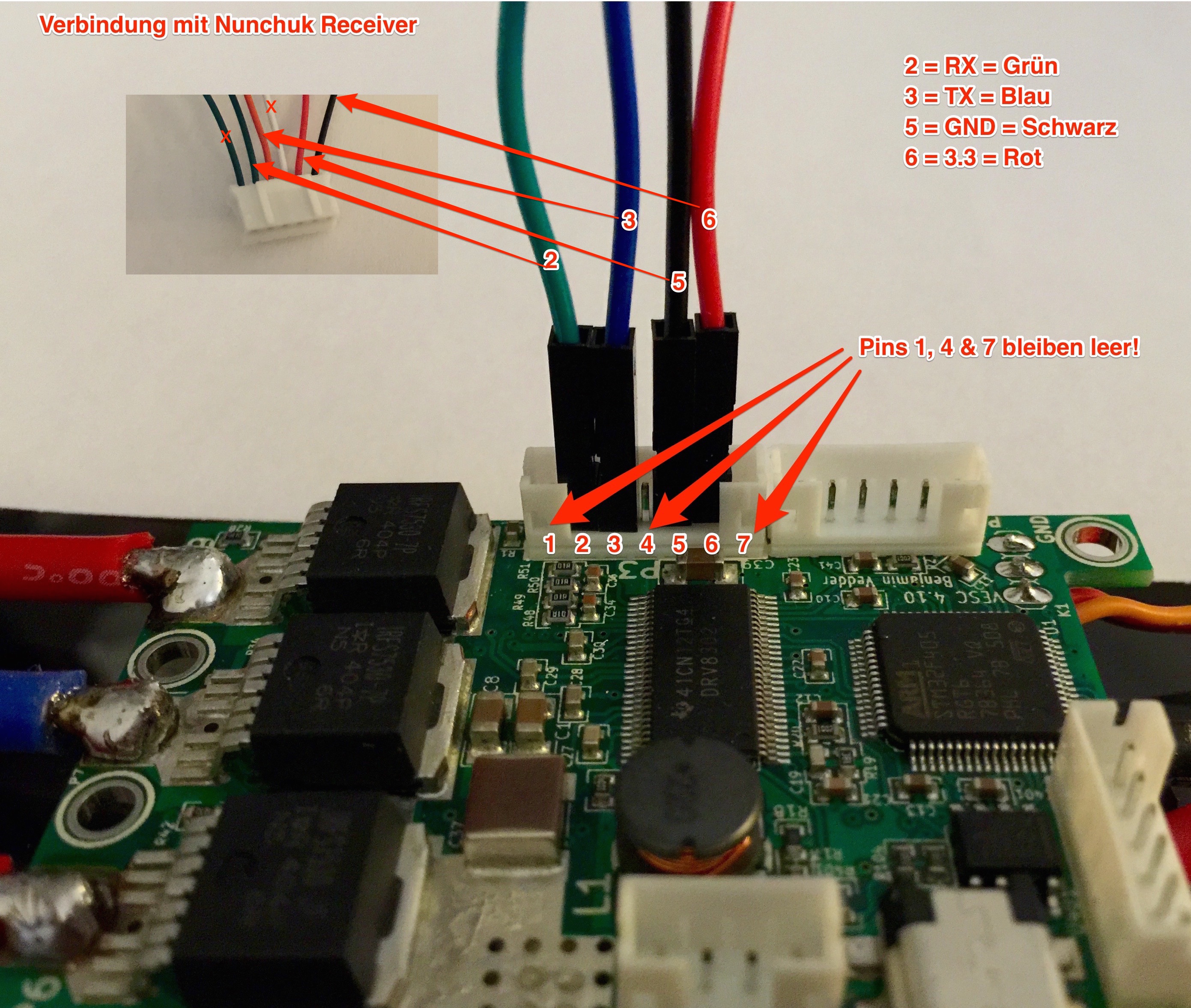
Und hier noch die V4.10 Pin Belegung für die Nunchuk Verbindung mit dem VESC (Wiki habe ich ebenfalls upgedatet):
-
Dürfte, hätte sollte... es ist nun leider so. Die fehlerhaften VESC verkaufen und bei dir neu kaufen ist die aktuellste Lösung. Stimmt!
Im Ernst, es müssen nur die richtigen Libraries installiert und der Code kompiliert werden, für denjenigen sich grundsätzlich damit auskennt ist das Kinderkram. Wie man das macht, hat Benjamin hier ganz gut beschrieben:
http://vedder.se/2015/01/vesc-open-source-esc/ (ab Software Installation and Configuration Tutorial)
Die Verkabelung des STLinkV2 mit dem 6Poligen Stecker sieht man hier:
-
Guter Punkt fürs Wiki, denn dieses Problem haben einige.
Dieses Problem dürfte eigentlich gar nicht auftreten, wenn die VESCs vor der Auslieferung richtig konfiguriert worden wären, da haben die Leute die die Teile verkauft haben schlicht gepennt! Und eine Anleitung dafür reinzusetzen ist aufwendig.
Anderes Thema - das hier hat Benjamin heute geschrieben:
It is very important to use the correct firmware for the hardware version since the pins have changed. Choosing the wrong firmware will almost certainly kill the VESC.Mit anderen Worten: wer die falsche Firmwareversion auf seinen VESC lädt, killt ihn mit ziemlicher Sicherheit!
Daher wie oben schon geschrieben, immer die Firmware aus dem richtigen Verzeichnis nehmen, bei FW 2.4 zum Beispiel:
- Verzeichnis hw_46_47: für VESC V4.7 (Datei: /mc_config_&_FW/firmwares 2.4 FOC /hw_46_47/VESC_default.bin)
- Verzeichnis hw_410: für VESC V4.10 (Datei: /mc_config_&_FW/firmwares 2.4 FOC /hw_410/VESC_default.bin)
- Verzeichnis hw_46_47: für VESC V4.7 (Datei: /mc_config_&_FW/firmwares 2.4 FOC /hw_46_47/VESC_default.bin)
-
Hi, ich habe schon mal ein Kickboard umgebaut, das ist aber rund 10 Jahre her. Sah nicht so gut aus aber war irre schnell (>60km/h) und hatte keine Bremse, einen Reibrollenantrieb & Motorrad-Akku. Ich muss mal nach Bildern suchen.
Herausforderung dabei: 1. du hast hinten eine durchgehende Achse und müsstest entweder die Aufhängung ändern oder aber ein schmaleres Rad einbauen, sonst ist da kein Platz für Ritzel etc. (oder ein Radnabenmotor mit 2 Achsenenden konstruieren). Wenn du mit Alu umgehen kannst, ist eine neue Gabel hinten sicher am einfachsten. 2. Das Deck hat Flex, d.h. entweder unten einen sehr flachen, flexiblen Kasten montieren oder oben auf dem Deck direkt hinter dem Wheel eine kurze Box befestigen.
Hier ein Bericht dazu.
PS. Mit dem Budget wirst du nicht hinkommen, 300€ sind realistischer für Motor, ESC, Akku.
-
Du meinst sowas wie die Zeichnung von Stefan90478?
Stefan hat aber einen Switch am BMS, der gehört bei dir dann vor den VESC (bzw. vor die Akkuanzeige).
-
1
-
-
Der Bootloader ist separat, aber man würde das bestimmt hin bekommen. Der Aufwand ist für mich nur größer als bei Win, da ich ohnehin schon Ubuntu hier habe.
-
Die gängigen 63er sind alle bis min. 8s ausgelegt, die oben beschriebenen 6354 bis 10s.
Bezüglich VESC einfach ausgedrückt: 6354/260kv für 8s, 6354/200kv für 10s.
-
wenn der VESC mit dem BLDC Tool nicht angesprochen werden kann, hat das meist eine der 4 Ursachen: 1. VESC hat keinen Strom, 2. USB-Kabel funktioniert nicht (tauschen), 3. der Port am Rechner wird nicht richtig erkannt (neu installieren) oder 4. die FW ist nicht korrekt installiert.
Bei 4. kann es sein, dass mit einer älteren BLDC Version die ältere FW aufgespielt werden kann, ansonsten muss mit einem STLinkv2 die FW (und sicherheitshalber auch der Bootloader) neu eingespielt werden.
PS. Kürzere Motorkabel wären besser, der VESC sollte aber trotzdem funktionieren.
-
1
-
-
Mal ganz der Reihe nach. Du hast jetzt auf beiden VESCs FW 2.4 drauf und machst welche Detection? Die unter BLDC Tab oder die unter dem FOC Tab?
Aber egal welche du machst, passieren sollte schon was. Ich vermute ja schon, dass die bootloader von beiden VESCs nicht richtig installiert waren und dass dein Umweg zur FW-Installation zwar geklappt hat, die Funktion trotzen nicht gegeben ist.
Die Anleitung für den Bootloader Update findest du auf vedder.se (im generellen Beitrag über VESC) und die Konfiguration des STLinks ist in einem separaten Beitrag.
-
Ja, das wäre die richtige.
Falls das einer von Enertion ist, kann es aber sein, dass der Bootloader nicht richtig drauf installiert wurde. Die Fehlermeldung ist dann die gleiche.
Helfen würde die Neuinstallation des Bootloaders. Geht aber nur mit ST-LinkV2 unter Ubuntu. Könnte ich aber für dich machen wenn das der Fehler wäre.
-
1
-
-
Du scheinst eine FW genommen zu haben, die nicht zu deiner HW passt. Einfach nochmal mit der richtigen updaten.
-
Damit schaffst du das zusammen mit den Komponenten die du oben genannt hast ohne Probleme. (Solange du nicht 30km am Stück den Berg hochfahren willst!
) -
Hier noch 2 Videos, die den Unterschied des VESCs mit/ohne FOC deutlich machen. Beim Betrieb mit 2 Motoren ist das noch extremer!
-
1
-
-
Ja, 6 Pin geht problemlos, 7er habe ich nirgends gefunden.
Wir haben die im Shop, allerdings ist es etwas aufwendiger für uns, für 1 Kabel extra zur Post zu fahren, daher verkaufen wir diese normalerweise mit den VESCs oder anderen Teilen. Das ist der Nachteil, wenn man das so neben dem normalen Job macht.
-
Alles einen Pin versetzen, d.h. entsprechend dem Foto bei Pin 2 beginnen, 1, 4 und 7 leer lassen.
In der 7 Pin Auslegung (Beschriftung hinten an der Buchse auf dem VESC), Farbe des Nunchuk Receiver Kabels:
1 = leer
2 = RX = grün
3 = TX = blau
4 = leer
5 = GND = schwarz
6 = 3.3 = rot
7 = leer
-
Ist das Verhalten bei 1.14 gleich wie bei 1.10?
Die KV Zahl durch 7 (Paare) kommt deiner KV Zahl schon näher. Die anderen Probleme kann ich ehrlich gesagt nicht beurteilen, hatte ich noch nie.
Die PPM Abbrüche (bzw. deren Auswirkungen) sind aber nicht schön, normalerweise fängt das der VESC locker ab.
Ist an der HW alles ok? bzw. ist das einer von Benjamin direkt oder von Enertion?
-
Weil du 2x plus dran hast.
Versuchs doch mal so wie auf meinem letzten Bild. D.h. das rote Kabel rechts einfach weglassen, dann sollte es passen.
-
Update:
Alle FW Versionen sind jetzt vollständig. Allerdings ist die Firmware 2.3 für FOC natürlich noch nicht so stabil wie die 1.14, das sollte man wissen, bevor man mit einer ausgefallenen Motorenversion (oder 12s!) auf FOC wechselt. Benjamin verbessert die FW aufgrund der bisherigen Erfahrungen sukzessive.
Mittlerweile sind meine Eigenbauboards mit FOC leiser als das Evolve! Hätte auch nicht gedacht, dass das geht. :thumbsup:


 Stimmt!
Stimmt! 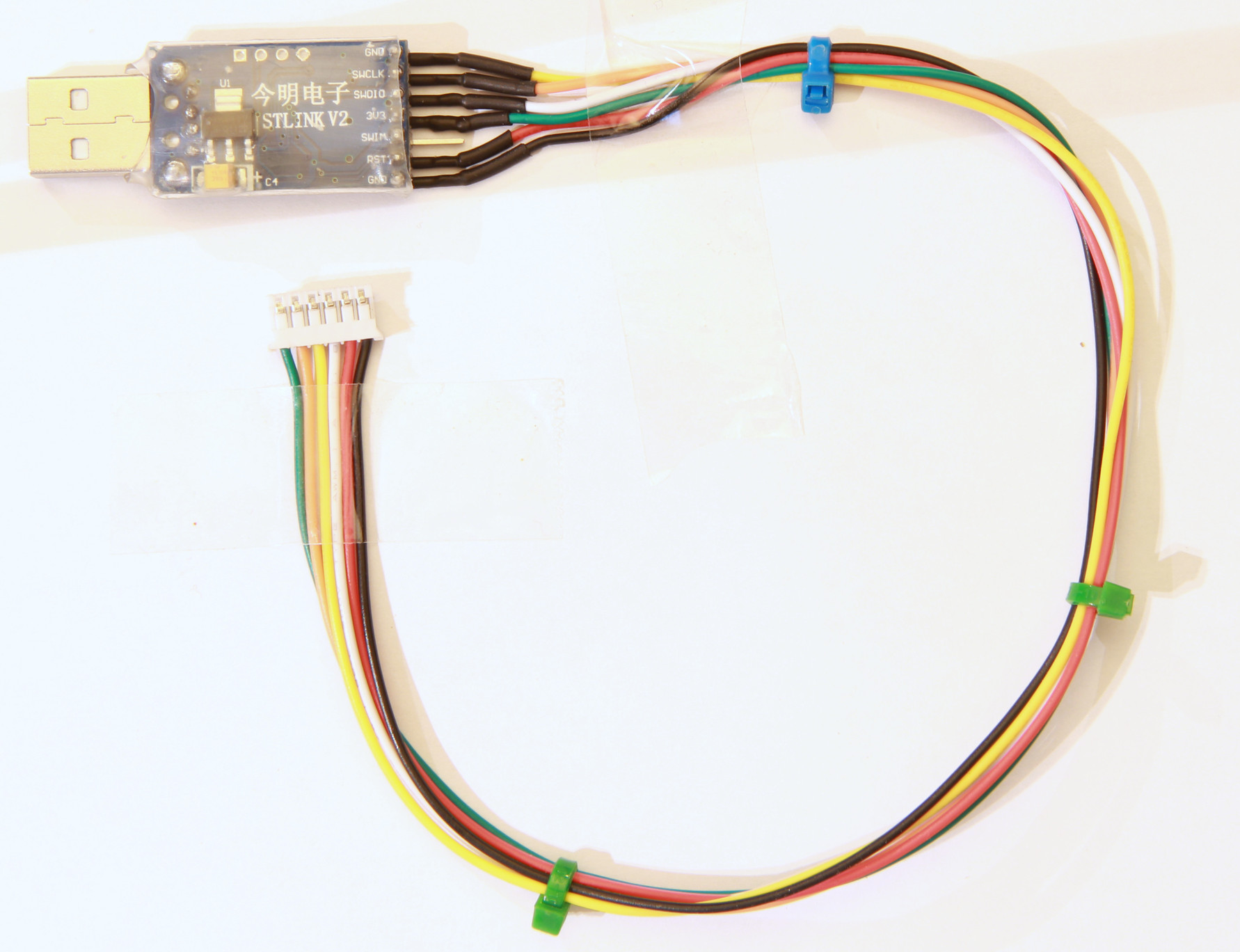


VESCs - made in Germany!
in VESC
Geschrieben
Das höre ich jetzt zum ersten Mal. Im Fenster daneben steht also gar nix? Kabel am Motor umstecken?