

elkick
-
Gesamte Inhalte
684 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
1
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Beiträge erstellt von elkick
-
-
Hier ist noch ein schönes Bild (von ES):

-
 1
1
-
-
Erste Tests sind wirklich unglaublich: die Motoren laufen so gut wie geräuschlos, erst bei starkem Bremsen hört man etwas, und auch dann nur leise.:thumbsup:
"Kurzanleitung" zur Motor Detection im FOC Modus, ein Wiki Update mit Bildern kommt noch:
- BLDC-Tool V2.3 runterladen und im gleichen Verzeichnis die Firmware runterladen (mc_config_&_FW.zip) und entpacken
-
VESC an die Stromversorgung anschließen und via USB verbinden
- "connect" klicken (BLDC Tool meldet limitierte funktion, da erst auf FW 2.3 upgedated werden muss)
- Firmware Tab anklicken, "choose..." anklicken
- im Verzeichnis mit dem Inhalt von mc_config_&_FW.zip: >firmwares 2.3 >und dort die richtige Hardware auswählen: V4.7 = "hw_46_47", V4.10 = hw_410 -> VESC_default.bin selektieren
- dann auf "Upload" klicken
- ACHTUNG: falls dann nichts passiert und der VESC sich disconnected -> VESC kurz ausschalten und wieder einschalten, sonst nichts verändern, dann wieder auf "connect" klicken und danach wieder auf "upload", dann geht's (*)
- nach dem Upload in den Tab "Motor Configuration wechseln" und "Read Default Configuration" (unten) klicken
- Seitlichen Tab "BLDC" selektieren" und dort den Commutation Mode auf "delay" umstellen (sonst nix ändern)
- Seitlichen Tab "FOC" selektieren
- Dann folgende Buttons in dieser Reihenfolge: "Measure λ", "Measure R and L", "Calc CC (Req: R and L)"
- HINWEIS: das Geräusch das die Motoren bei "Measure R und L machen" ist echt irritierend -> nicht verunsichern lassen!
- "Write Configuration klicken" (nur zur Sicherheit)
- zum seitlichen Tab "Motor" wechseln und "FOC" auswählen
- nochmal "Write Configuration" klicken
- in den oberen Tabs auf "App Configuration" wechseln und "read configuration" drücken
- danach wie immer die Fernbedienung einrichten (s. Wiki), danach "write configuration drücken", dann "reboot" (der Button jetzt oben rechts, nicht mehr unten!)
- Fertig.
Nachtrag:
auf dem Google drive den ich oben verlinkt habe fehlt im .zip file noch die richtige FW2.3 für VESC 4.7 (unter FW_410 = V4.10 ist alles vollständig da, darf aber für VESC V4.7 nicht verwendet werden)! Die einzige die FW 2.3 die im Ordner FW_46_47 drin ist funktioniert nicht. Wird von Jacob Bloy nachgereicht, dauert aber etwas. Wenn direkt mit der Ubuntu Version von Benjamin gearbeitet wird, ist das aber kein Problem.
-
3
- BLDC-Tool V2.3 runterladen und im gleichen Verzeichnis die Firmware runterladen (mc_config_&_FW.zip) und entpacken
-
Benjamin Vedder hat die neue Firmware mit FOC veröffentlicht:
Muss ich heute mal testen, die Motor Detection ist natürlich etwas anders aufgebaut.
-
Nein, die brauchst du nur zum direkten anschließen des Kama Nunchuk Receivers.
-
1
-
-
Wenn Liion Akkus mit BMS verbaut werden reicht andererseits auch ein einfaches LiIon CCCV Ladegerät.
-
Vom Endpreis 1600€ ausgehend, bekommt man 2 komplette Plug&Play Syteme hin, mit jeweils 2 Radnabenmotoren, die von Dutzenden von Leuten gefahren werden und sich bewährt haben.
Diesen Nachweis muss Mellow erst noch bringen. Das Design ist zweifellos toll, aber was bringt mir das, wenn die Motoren dann ev. nicht so performen wie ich das gern hätte? Und das für 1600€ ohne Rückversicherung?
Im übrigen habe ich das erste Mal Erfahrungen mit der Insolvenz eines Kickstarter Unternehmens sammeln dürfen. Das Thema Kickstarter hat sich für mich damit für alle Zeiten erledigt. Geld weg, kein Produkt, keine Rechte. So ist das eben. Wer auf's Geld verzichten kann, soll das ruhig machen.
Das soll keine Unterstellung gegenüber Mellow sein, ich hoffe ja, dass das ein Erfolg wird.
-
Also die Kabel neben dem Elko sind die Stromversorgung, die drei unten am VESC gehen zum Motor. Die Reihenfolge der Motorkabel ist egal, wenn er rückwärts dreht, einfach zwei Kabel umstecken.
-
Du musst den Stecker vom PPM Kabel am Wiiceiver einstecken (obere Pins, wobei das eigentlich egal ist, nur richtig rum sollte der Stecker sein).
Hase/Igel geht zumindest mit der älteren Version des Wiiceivers nicht, die neue kenne ich allerdings nicht. Musst mal im ES Forum schauen, da gibt's aktuell einen Thread dazu.
-
1
-
-
@christian, ich würde bei 7s Option 1 nehmen! Die Kapazität reicht locker und die Reserve beim Entladestrom ist für 7s ganz gut, auch wenn man sie kaum benötigen wird, außer ev. bei steilen Bergen!
-
Gelöscht, weil ich das ja schon mal weiter oben geschrieben habe!
-
Ein Wifi Modul kann man auch an den VESC montieren.
Zum Setup möchte ich mich mal selbst zitieren:
Basis Konfiguration, Reichweite ca. 30km, Geschwindigkeit 40km/h:
- 30-36" Longboard Deck ohne Flex
- Caliber II Achsen
- Orangatang Kegel Wheels (Orange oder Purple)
- 1x 6354 Motor mit <230kV (oder 2 davon, falls häufig Steigungen befahren werden)
- 1x Motorhalterung für 63er Motoren (oder 2x, siehe oben)
- 1x VESC (Motorsteuerung, oder 2x, s.o.)
- 14er Ritzel/36er Zahnrad (oder 2x, s.o.)
- 9mm/275mm Zahnriemen (oder 2x, s.o.)
- 10s Akku, >7.5Ah mit BMS (z.B. selber bauen mit 18650er Zellen) oder einen fertigen 10S Lipo Akku mit BMS kaufen
- Ladegerät CCCV für 10s LiPo/LiIon oder Modellbauladegerät & Netzteil für 10s, falls kein BMS verbaut wird
- Antispark Powerswitch (zum Einschalten des Boards, selber bauen oder kaufen)
- Gt2B Fernbedienung (und ev. umbauen, s. Wiki) oder Kama Nunchuk am VESC
- Kleinteile wie Ladebuchse, Kabel, Lot und Lötkolben, XT60 Stecker und 3x (oder 6x) 4mm Buchsen für die Motoren
Bezugsquellen: hobbyking.com, enertionboards.com, diyelectricskateboard.com, aliendrivesystems.com, alienpowersystem.com, esk8.de
Das ist aber nur meine persönliche Ansicht, jeder hat andere Präferenzen!
- 30-36" Longboard Deck ohne Flex
-
Das schrieb Benjamin mal dazu:
Not all nunchuks are working with the VESC (and not with the wiiceiver either). For example, the original wii nunchuk needs different code than the nyko kama because the decryption cannot be disabled... and that code does not work for the kama. I also had another nunchuk from deal extreme that I had to use yet another version of the code for. The DX chuk had really slow update rate and was not reliable.Die Nunchuk Modifikation von Benjamin sollte aber bald erhältlich sein.
-
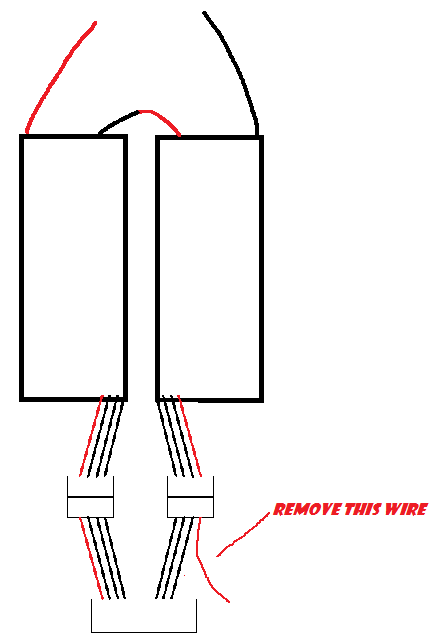
Also eine Garantie kann ich zwar nicht übernehmen, aber ich habe das so gemacht. Einfach die Reihenfolge einhalten der einzelnen Kabel auf den Steckern, welcher dann der erste ist, ergibt sich daraus, wie du die beiden Akkus gekoppelt hast:
Du solltest den Balancer-Pluspol des Akkus, dessen "Haupt"-Pluspol zum ESC geht, als erstes mit dem BMS verbinden und danach die dazu gehörenden restlichen Kabel des Balancer Steckers. Danach folgt der 2. Stecker, angefangen mit dem Pluspol (den du aber nicht mehr anschließt, sonder weglässt!) und den restlichen Balancer Kabeln. Schwierig zu erklären ohne Bild.
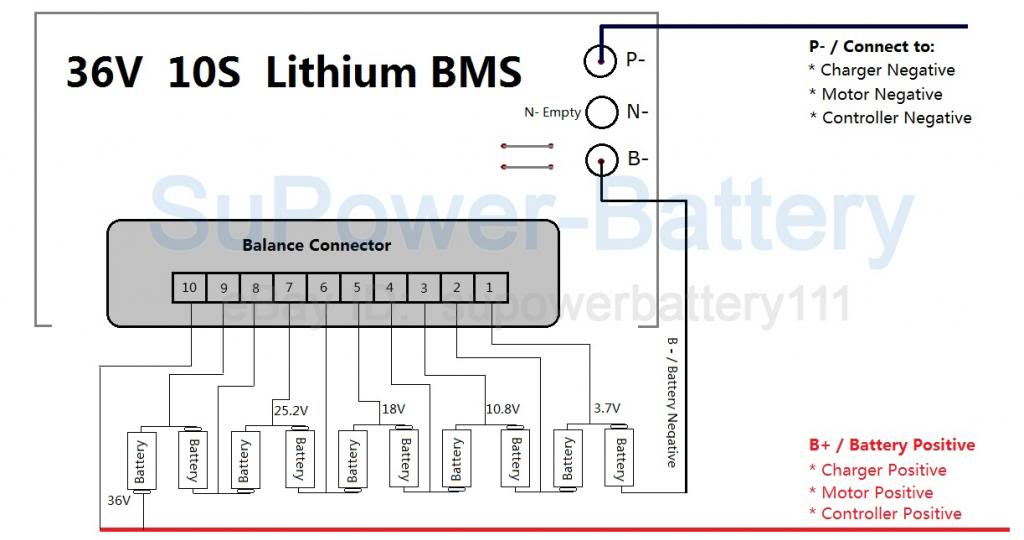
Schematisch in etwa so (ausser dass das Plus-balancer Kabel von deinem 1. Stecker verwendet wird und nicht das Kabel direkt vom Akku):
-
Du hast ja hoffentlich die Stecker noch an den Akkus dran, dann kannst du ja einfach einen nach dem anderen abschneiden und an die BMS Balancer Kabel anlöten. Die beiden plus gehen dann auf den einen plus am BMS Balancer Stecker. Dann stimmt auch die Reihenfolge.
Und erst nachdem du alles fertig gelötet hast den Strom einschalten. Hört sich jetzt doof an, ich weiß, ist mir aber auch schon beinahe passiert.
-
Am besten ein Foto Album anlegen und danach im Beitragstext darauf verlinken.
-
Im Warenkorb ist Ware aus dem International Warehouse, daher die Kosten. Leg den Warenkorb besser nochmal komplett neu an und selektiere als erstes das EU-Warehouse und erst dann die Teile.
-
1
-
-
Missverständnis, mir ging's nicht um die ERPM, das ist tatsächlich ein Problem mit dem DRV8302 solange der auch noch mit Temp-Sensorik und anderem beschäftigt ist. Da müsste man alles mögliche rausschmeissen und erst mal sehen, ob das wirklich noch funktioniert.
Für 0.5mOhm gibt's die entsprechende FW-Version (1.14, wahrscheinlich auch für die älteren, habe nicht nachgeschaut), bringt aber nicht das was du brauchst, daher ist eine komplett eigener Aufbau wahrscheinlich besser. Die 100K ERPM signifikant zu steigern wird mit der bestehenden HW nicht gehen denke ich.
Aber das wäre dann schon wieder ein Thema für einen eigenen Thread.
-
Nein, leider nicht. Die JST-PH 2mm Stecker sind bei den Modellbauern auch selten zu finden.
-
1
-
-
doppelt, daher gelöscht
-
E b a y - Artikel-Nr. 262145395224, Verkäufer ist zuverlässig und liefert schnell (aus Deutschland!).
PS. Der Stecker passt auch in die 7Pin Buchse des VESC V4.10.
-
1
-
-
Benutzt du einen Wiiceiver zwischen VESC und Nunchuk Receiver (Dongle)?
Wenn nicht, könnte es generell am Logic3 liegen, ich bekomme den mit dem VESC nicht zum Laufen, nur die Kamas gehen.
Mit den Kama Nunchuks (+Receiver) hatte ich in den letzten 6 Monaten auf sämtlichen Boards keinen einzigen Ausfall, wobei es bei den Teilen schon Qualitätsunterschiede geben mag.
-
Da Benjamin Vedder selber Modellbauer ist, arbeitet er bereits seit einigen Wochen an einer speziellen FW Version für diese Anwendungen und es gibt auch schon Testversionen dafür.
Gleichzeitig überlegen wir die Shunts und FETs für Modellbauanwendungen anzupassen (zB. 40V FETs und 0.5m Ohm Shunts). Ist halt die Frage, ob die Stückzahl dann Kosten/Nutzen in einer gesunden Relation zulässt.
-
Wir hätten auch schon viel früher mit so einem Shop beginnen sollen, das stimmt. Und genau darum verkaufen wir prinzipiell nur das was auch da ist, um die Leute nicht im Regen stehen zu lassen.
Leider nimmt diese unsägliche Mentalität im Netz immer mehr zu, so im Stil "Hauptsache die Leute bezahlen im Voraus, liefern kann ich dann ja immer noch, bin ja der einzige der die Teile hat".
Das geht uns wirklich dermaßen auf die Nerven und ist der eigentliche Grund warum wir unsere Freizeit mit diesem Shop verbringen!
So, muss jetzt JST-PH Kabel mit Steckern bestellen...
-
Nein, wir fertigen immer Kleinstmengen und füllen dann das Lager kurzfristig auf. Das hat den Vorteil, dass wir flexibel auf zukünftige HW Änderungen reagieren können, ist aber etwas kostenintensiver.
Dazu kommt, dass wir die VESCs auch den Modellbauern zugänglich machen wollen, und da können die Anforderungen in der Zukunft etwas variieren.



Streetboard Eigenbau Konfigurationscheck, Verbesserungen erwünscht
in Eigenbauten
Geschrieben
260 ist grundsätzlich schon ok bis , wobei beim VESC und 10s um die 200-240 etwas besser wären (habe ich in einem anderen Thread schon mal etwas Quatsch geschrieben, da ich das nicht bedacht hatte).
Das hängt mit dem VESC zusammen, der zu hohe ERPM nicht so gern mag.