

Duffman
-
Gesamte Inhalte
535 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
1
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Beiträge erstellt von Duffman
-
-
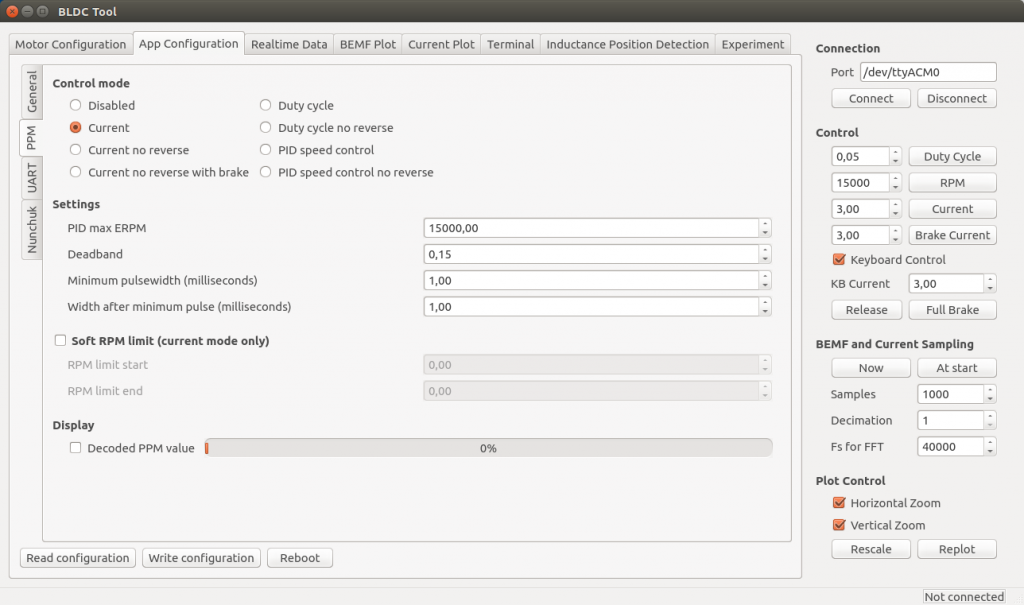
Hast du dir mal im BLDC-Tool den empfangenen PPM Wert anzeigen lassen? Folgt dieser linear der Triggerstellung?
Hast du mal an Settings geschraubt?
Deadband -> Totbereich in Triggermittelstellung
min. pulsewith -> Untere PPM Grenze
with after min pulse -> gültiger PPM Bereich ab der unteren Grenze
Bild vom älteren BLDC-Tool:

-
Hmm schade... und wir haben es nicht geschafft mal ne Runde zusammen zu drehen.
-
 1
1
-
-
Wie ist denn die genaue Funktionsweise von dem Switch?
Schalten die FETs direkt voll durch und es entsteht zwar kein Blitz aber dennoch eine große Stromspitze?
Oder werden die Kondensatoren sanft vorgeladen und die FETs schalten erst nach einer gewissen Zeit voll durch?
-
Gib ihn nicht so schnell auf, so ein geplatzter DRV ist schnell getauscht und wenn man so liest wieviele bei ES schon ihren DRV geschossen haben bist du sicherlich kein Sonderfall. Ob drumherum noch etwas kaputtgegangen ist müsste man dann ohne DRV mal messen.
-
Hey Leute,
ich hab noch einige VESC 4.7 PCBs rumliegen. Also falls Jemand eine ältere Revision bauen möchte oder einfach nur Lötübungen an nem DRV
machen möchte, einfach bei mir melden.Gruß
Peter
-
Was ist passiert? Genau für solche Motoren ist der VESC doch vorgesehen?
-
Ich hab ja ein standard Setup mit recht kleinen NTM5060 Motörchen allerdings 4 mal. Daher lief das Ganze eigentlich schon beim ersten mal prima.
Am Wochenende hab ich das Hubmotor eBike von meinem Nachbar auf VESC umgebaut. Da hab ich ungefähr 10 Versuche mit zwischenzeitlichem Parameterändern gebraucht bis die Motorerkennung sauber lief. Danach nur noch die Motorkennwerte und Hall Konfig übertragen und ab gehts.
Läuft jetzt mit 12s und 60A Akkustrom. Also bei vollem Akku knapp 3kW im Vorderrad.
Zieht sauber von 0 - Max durch und reicht auch locker für nen Burnout.Sollte doch auch irgendwie mit deinen Motoren ordentlich zum laufen zu bringen sein.
-
Das ist aus Benjamin Vedders Blog:
http://vedder.se/2015/01/vesc-open-source-esc/
Irgendwo im Bereich der BLDC-Tool Screenshots.
-
1
-
-
Ich geh mal davon aus, dass der Kurzschluss über PWM der Stickstellung entsprechend gesteuert wird. Hab ich nie genauer analysiert. Allerdings entspricht die Bremswirkung bei voll gezogener Bremse in niedrigen Drehzahlen oder im Stand wirklich der von kurzgeschlossenen Motorwicklungen. Da muss man schon gefühlvoll rangehen oder drauf vorbereitet sein sonst haut's einen auch mit Bindungen und Heelstraps weg....
-
Steht nicht irgendwo in den weltweit gültigen Forenregeln, dass jeder dritte Post ne dumme Bemerkung sein muss?? :devil:
-
Ist alles richtig, zumindest teilweise ;-)
Normalerweise bremst der VESC regenerativ. Unterhalb einer einstellbaren Drehzahlgrenze bremst er nicht mehr regenerativ, indem er die Motorwindungen kurzschließt. Diese wirken somit als Bremswiderstand und erwärmen sich.
Würde man die Drehzahlgrenze hochsetzen könnte man also auch komplett nicht regenerativ bremsen.
Wenn ich voll in die Eisen gehe, schaffe ich es kurzzeitig bis zu 40A zu regenerieren (Stromzange). Die gesamte rückgespeiste Energie ist aber meist doch recht gering, wir wollen ja fahren und nicht bremsen.
Gruß
Peter
RPMMax and Min ERPM are hard RPM limits. It is preferable to use the soft application RPM limits instead if possible.
“Max ERPM at full brake” (should change the name…) is the highest opposing RPM at which a direction change is allowed. Setting this too high will cause cogging when moving in one direction and giving high throttle in the other direction. On my longboard I have it at 300 and my RC car has it a bit higher.
“Max ERPM at full brake in CC mode” is the highest RPM at which applying full brake by shorting all the motor windings is allowed. Setting this value too high can cause much mechanical stress in some circumstances. I have it at 1500 for all my applications.
-
1
-
-
Hast du auch schon testen können?? Ist das Verhalten identisch? Hast einen Servotester, den du zum Probieren dranhängen könntest? Nunchuck? Motorprüfstand??
Als ich meine VESC zusammengelötet hab, hab ich mir einen Motorprüfstand improvisiert indem ich zwei Motoren mechanisch gekoppelt und jeweils über einen Regler angesteuert hab. Den einen Motor hab ich über das BLDC Tool angesteuert und ihn im Stromregelmodus betrieben und den zweiten über einen Servotester im Bremsmodus.
Könntest du ja auch genau anders rum machen, also Bremsstrom über BLDC Tool vorgeben und mit der Funke gasgeben.
Zusätzlich hatte ich an einem Motor noch einen Drehmoment-Messarm, der auf eine Waage gedrückt hat, was bei dir ja erstmal nicht unbedingt nötig ist.
So ungefähr sah das bei mir aus:
-
Ja, bei dir scheint noch Irgendetwas anderes Probleme zu bereiten, wobei das Verhalten, dass du im Video demonstrierst normal ist. Bei 'current control' geht die Drehzahl schon bei kleinem eingangssignal auf max. Allerdings sollte das Drehmoment linear mit dem Signal ansteigen was man aus dem Video leider nicht schließen kann.
Wenn du auf 'duty cycle' stellst, sollten Drehmoment und Drehzahl linear ansteigen. So arbeiten alle anderen RC ESC's.
Zum testen kannst du auch mal auf 'pid speed control' stellen. Dabei wird die Drehzahl geregelt und sollte auch bei wechselder Belastung immer linear dem ppm Signal entsprechen. Eignet sich aber NICHT zum fahren, da der Regler immer schnellstens versucht mit vollem Drehmoment der Triggerstellung zu folgen...
-
1
-
-
Sieht gut aus!
Mit dem VESC habt ihr es sicherlich deutlich einfacher als mit dem anderen Regler.
Stell bei "Battery Max" einfach den maximalen Strom ein, den deine Akkukonfiguration hergibt und bei "Motor Max" den maximalen Strom, bei dem es euch nicht vom Board haut.
Der Motorstrom ist auch in den meisten Fällen NICHT gleich dem Akkustrom. Du kannst bei geringer Drehzahl einen höheren Strom am Motor haben als aus dem Akku entnommen wird, da die Kondensatoren die Stromspitzen abfangen. Das heißt, du kannst mit einem "schwachen" Akku trotzdem ordentlich anfahren (bis der Motor qualmt :-), die Leistung fehlt dann höhstens bei höheren Geschwindigkeiten.
Hab in Exos Thread auch gerade folgendes zu dem Thema geschrieben:
Ich versuch da mal etwas Klarheit reinzubringen:Die Werte "Motor Max" und "Battery Max" bewirken auf den ersten Blick das Gleiche: Den Strom begrenzen. Da sie aber an unterschiedlichen Stellen eingreifen bewirken sie dennoch unterschiedliche Dinge:
Der Wert "Motor Max" regelt den maximalen Strom, der durch den Motor fließt und begrenzt damit direkt das maximale Drehmoment des Motors.
Das kann man übrigens auch sehr einfach berechnen: 9,55 / KV * Strom (in A) = Drehmoment (in Nm)
"Motor Min" ist das Gleiche, nur halt beim Bremsen.
Der Wert bestimmt also den maximalen Durchzug des Boards unabhängig von der Geschwindigkeit.
Der Wert "Battery Max" regelt den maximalen Strom der aus dem Akku gezogen werden darf und begrenzt damit die Leistung. Dies wirkt sich fast nur bei höheren Geschwindigkeiten aus, da nur dort richtig Leistung umgesetzt wird.
"Battery Min" ist das Gleiche, nur halt beim Bremsen.
Stellt man einen großen Wert bei "Motor Max" ein und einen kleinen bei "Battery Max" bewirkt das viel Drehmoment bei geringen Drehzahlen und wenig Drehmoment bei hohen Drehzahlen.
Noch mal in Kurzform:
Motorstrom=>Drehmoment unabhängig von Drehzahl
Akkustrom =>Leistung=>Drehmoment bei hohen Drehzahlen
Gruß
Peter
-
Ich versuch da mal etwas Klarheit reinzubringen:
Die Werte "Motor Max" und "Battery Max" bewirken auf den ersten Blick das gleiche: Den Strom begrenzen. Da sie aber an unterschiedlichen Stellen eingreifen bewirken sie dennoch unterschiedliche Dinge:
Der Wert "Motor Max" regelt den maximalen Strom, der durch den Motor fließt und begrenzt damit direkt das maximale Drehmoment des Motors.
Das kann man übrigens auch sehr einfach berechnen: 9,55 / KV * Strom (in A) = Drehmoment (in Nm)
"Motor Min" ist das Gleiche, nur halt beim Bremsen.
Der Wert bestimmt also den maximalen Durchzug des Boards unabhängig von der Geschwindigkeit.
Der Wert "Battery Max" regelt den maximalen Strom der aus dem Akku gezogen werden darf und begrenzt damit die Leistung. Dies wirkt sich fast nur bei höheren Geschwindigkeiten aus, da nur dort richtig Leistung umgesetzt wird.
"Battery Min" ist das Gleiche, nur halt beim Bremsen.
Stellt man einen großen Wert bei "Motor Max" ein und einen kleinen bei "Battery Max" bewirkt das viel Drehmoment bei geringen Drehzahlen und wenig Drehmoment bei hohen Drehzahlen.
Noch mal in Kurzform:
Motorstrom=>Drehmoment unabhängig von Drehzahl
Akkustrom =>Leistung=>Drehmoment bei hohen Drehzahlen
Gruß
Peter
-
1
-
-
Hi Mario,
sieht gut aus, was du da vorhast und mit deinen 1,6kWh bei nem Streetboard könntest du neue Reichweitenrekorde aufstellen.
Ich hoffe du bist dir bewusst, dass du die Matrix Achsen (genau wie alle anderen Channel Trucks) ca. 30° - 35° anstellen musst um die optimale Lenkwirkung zu erzielen. Nur so auf ein planes Deck geschraubt, kannst du es zwar neigen aber die Achsen lenken nicht ein.
Müsstest also irgendeine Form von Keilen zwischen den Achsen und dem Deck vorsehen, aber wenn ich mir deine sonstige Vorbereitung ansehe hast du dafür bestimmt schon eine Lösung parat.
Gruß
Peter
-
Du brauchst am LiPo-Warner nur den Minuspol abklemmen bzw. über nen Schalter von außen trennen und schon gibt der Ruhe. Die anderen Pins können dauerhaft verbunden bleiben, die gehen nur auf die Messeingänge und ziehen keinen Strom. Hab ich bei meinem Board genauso gelöst und läuft problemlos.
-
Gibt leider noch kein Video von der Tour mit Spikes. Aufgrund der Kälte hat der Handyakku nach kurzer Zeit schlapp gemacht. Muss wohl doch abwarten bis meine Actioncam eintrifft...
Aber hier sind trotzdem ein paar Impressionen:
Der Schnee ist jetzt auch erstmal wieder geschmolzen, mal sehen ob noch mal was kommt...
-
Leider trennen uns ein paar Meter, aber mit ca. 50 Akkuladungen könnt ichs zu euch in die Schweiz schaffen
(bei Typ C Fahrweise -> am liebsten im Graben neben der Straße :devil:)
-
Die Tour im Video bin ich auch noch ohne Spikes gefahren. War vom Grip her noch ganz OK. Vergleichbar mit dem Fahren auf Laub.
Bin danach noch mal mit Spikes gefahren, damit hat man dann echt Grip ohne Ende. Ist wie auf Asphalt!!! Damit könnt ich die Kiddis den Rodelhügel hochschleppen... muss endlich irgendwen überreden sich mit dem Snowboard hinter mir herziehen zu lassen, aber die haben alle schiss... Vielleicht bekomm ich ja so meine Reichweite noch auf 8km runter ;-)
Ach ja, bin ich damit eigentlich schon "Typ C" Fahrer??
-
Ach verdammt, mit dem Mondmobil hast du recht, sieht meinem Board doch sehr ähnlich... ;-)
Hab gestern einen neuen Rekord aufgestellt:
12s 20Ah auf 10km leergebraten :devil:
Keine Ahnung warum meine Akkus so schnell leer sind, vielleicht hilft dieses Video bei der Aufklärung:
:peace:
-
1
-
-
Sieht super aus dein Wechselskkusystem und auch die Idee mit dem LiPo Wächter direkt am Akkupack ist grandios. Wenn ich einen Akkusatz tausche muss ich immer 12!!! Stecker lösen und wieder einstecken. :mad: Deine Lösung bringt mich da schon wieder auf viele neue Ideen, aber das Jahr hat ja gerade erst begonnen...
-
Doppelupdate:
1. Damit Nicola endlich aufhört mich wegen meinem Panzerband zu mobben
, hab ich endlich mal die fehlenden Kettenabdeckungen gedruckt und montiert: 2. Da die neuen Stollenreifen sehr sehr seeeehr viel Dreck umherschleudern und das Wetter mir auch nicht gerade entgegen kommt musste ich mir doch noch Schutzbleche bauen. Diese sind bei schönem Wetter allerdings mit wenigen Schrauben abnehmbar.
Die Halteplatte besteht aus 4mm Alublech und das Schutzblech selbst aus 2mm Alublech. Beide Bleche habe ich wieder bei Geerscutting.de laserschneiden lassen.
Danach habe ich die Schutzbleche abgekantet und mit Poppnieten an den Halteplatten befestigt.
... und so sah das Ganze nach einer kleinen Probefahrt aus:
Gruß
Peter
-
1
-
-
Hallo Xllxis,
das gleiche Problem hatte ich bei einigen von meinen NTM5060 auch schon. Ich vermute, dass wenn man die Motoren quält, der Kleber mit dem die Wicklungen getränkt sind weich wird und die Wickeldrähte durch das starke Magnetfeld aus der Nut gedrückt werden.
Ich habe die Litzen wieder zusammengelötet und den Stator danach großzügig mit Sekundenkleber getränkt. Seitdem hatte ich mit den Motoren keine Probleme mehr.
Gruß
Peter
-
2
-
 machen möchte, einfach bei mir melden.
machen möchte, einfach bei mir melden. Zieht sauber von 0 - Max durch und reicht auch locker für nen Burnout.
Zieht sauber von 0 - Max durch und reicht auch locker für nen Burnout.
Longboard Eigenbau, KHEPRI 46" Bamboo-Maple Board
in Eigenbauten
Geschrieben
Gilt das unter Last oder im Leerlauf?
Was zeigt das BLDC-Tool an? Folgt die Anzeige dem Triggerweg linear oder springt sie von 0 auf 100?
Hast noch ne andere Fernsteuerung zum probieren oder vielleicht nen Servotester oder nen Nunchuk?