

gerald-z
-
Gesamte Inhalte
299 -
Benutzer seit
-
Letzter Besuch
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Beiträge erstellt von gerald-z
-
-
Ich möchte auch kurz meinen Senf dazugeben.
zwei Motoren 50km/h mit 6s = Motorquälerei
Das ist wie bei einem Rennwagen. Hochgezüchtet mit kurzer Lebensdauer oder weniger rausholen und länger Spaß haben.
Als erster werden deine Lager aufgrund des ausgelaufen Fettes sterben.
Wird die Temperatur der Motoren zu hoch. Läuft das Fett aus den China Lagern. Sollte Schmutz am vorderen Motor kleben. Ist das aufgrund des Herausgeschleuderten Lagerfett und erste Anzeichen.
Meine Einstellung. Weniger v/max dafür mehr Reichweite = Akku, Motor, Regler wird es dir danken. :thumbsup:
-
Ich denke schon das die Belegung Standard ist.
Wenn bei einem Modellbau Auto der Motor getauscht mir möchte man doch nicht immer auch gleich den ESC Rausschmeißen.

-
Ich bin auch nicht in einem Besitz eines Sensor fähigen Esc. Beim Testen kann ich also nicht helfen.
-
Sieht sehr gut aus Barney :thumbsup:
Muss man die Beiteile selber bestücken?
Wenn ja geht das mit einem Heißluftfön?
Wie gesagt. Wenn du eine Platine ohne Leiterbahnen zum testen brauchst. Ist das kein Problem.
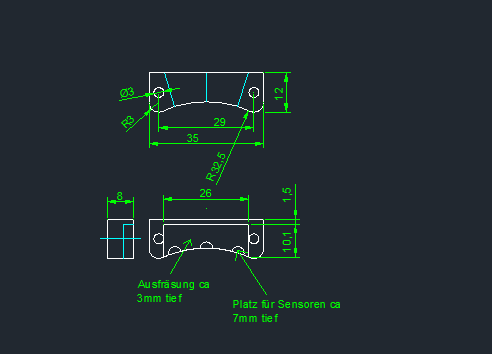
Dazu bräuchte ich deine Zeichnung und den Bohrungsabstand der Sensoren.
-
Barney kommst du mit dem Platz aus für deine Platine?
Ich meinte die Anordnung der Bauteile
Entwurf 1:
-
Sorry Kai aber ein 5mm Gehäuse ist nicht Realistisch.
Da müsste ich im Innenbereich mit einem 1.5mm Fräser arbeiten.
Ich hab hier eine m3 Senkkopfschraube. Der Kopf hat 5.5mm
Das wird zu fummelig.
10 - 12mm ist denke ich Realistisch?
-
Bezüglich Halterung
Eventuell ein ca 8mm dickes Schutzgehäuse das die selbe Außenkontur wie die Platine hat.
Somit ist alles geschützt.
Dann müsste man noch einen Klemmring für den Motor machen. Der dann mit zwei langen Schrauben.
Platine, Gehäuse und, Klemmring zusammenhält.
Mann könnte aber auch einen kleinen Bogen oder Ring mit integrierten Langlöchern fräsen.
Der Bogen oder Ring wird an der Motorhalterung festgeschraubt.
Somit könnte man den Sensor inkl. Gehäuse um einige Grade verstellen. Wenns dann passt einfach die beiden Schrauben festziehen und fertig.
Bei einem Ring würde der Motor am vorderen Bereich gegen Staub und Wasser geschützt.
Wenn der Sensor an der Motorhalterung geschraubt wird. Kann der Motor bei bedarf ausgebaut werden ohne danach neu eingestellt werden zu müssen.
-
Die letzte Variante ist ja schon sehr kompakt.
Also 35x14mm ist nicht viel. Ich finde so viel Platz sollte jeder haben.
Wer ihn nicht hat braucht interne Sensoren.
-
Ein Debug-Board klingt auch gut.
Wenn man die Platine liegend einbaut.
Sieht es schön aus aber Stabil ist das dann nicht mehr.
Sollte etwas zwischen Motor und Sensorboard kommen ist alles kaputto.
Ich kann auch kein Gehäuse fräsen das ca 30x10mm und 20mm hoch ist.
Dann sollte efentuell noch eine 20x3mm Tasche drin sein mit einer Wandstärke von 2.5mm. Das geht nicht. :confused5:
Dann lieber stehend und so kompakt wie möglich machen.
-
Mal so als Interesse. Kann man die Hallsensoren nicht direkt an einem Bl Regler anschließen?
Also den Schalter würde ich nicht benötigen.
Nächste Idee:
Alle Bauteile auf einer Seite inkl. der benötigten Led. Schalter weg lassen und ein Teil des Gehäuse aus Plexiglas. Somit würde die Led durchleuchten. Wenn möglich mehr als zwei Schrauben verwenden. Somit würde das ganze stabiler sein und besser abdichten.
-
Also mir würde ein Kontrolle Led reichen.
Währe es eventuell möglich alle Bauteile auf einer Seite zu bestücken. Damit die gesamten Bauteile im Gehäuse verschwinden und sie währen gegen Wasser und Staub geschützt.
Die Led verkehrt herum einlöten und durch ein kleines Loch in der Platine durchleuchten lassen.
-
Oke
Wenn du mir deine Mail gibst sende ichs dir gleich.
Ja Led auf der Rückseite klingt gut. :thumbsup:
-
Würde es mit Autocad gehen?
Abspeichern in eine dxf Format ist auch möglich.
Oder kannst du mit dem nichts anfangen?
-
Ich würde eine Einseitige Platinen Bestückung bevorzugen.
Dann könnte man im Kunststoff eine Tasche fräsen wo dann das Sensorboard mit den Sensoren voran hineingesteckt wird.
Sozusagen die Rückseite der Platine bildet den Deckel.
Ich hoffe ich hab das so so einigermaßen verständlich ausgedrückt?
Gruß Gerald
-
Barney
Wenn die Löcher in den Leiterbahnen gebohrt sind würde es völlig reichen.
Man könnte es Zusammengebaut Kunststoff + Platine die Kontur fräsen und es würde bündig abschließen.
-
Denn Staubschutz habe ich bei mir schon zwei Jahre im Einsatz.
Aber leider ohne integrierte Sensoren.
Mit dem Thema habe ich mich schon vor längerer Zeit beschäftigt.
Hab aber dann wieder aufgeben.
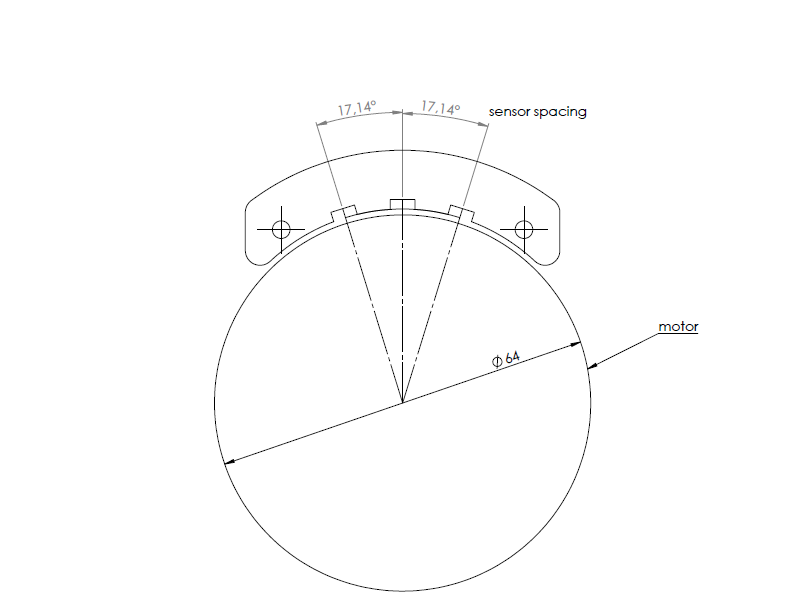
Bezüglich Snordnung der Sensoren. Habe ich vor langer Zeit diese Zeichnung gefunden.
Ich würde gerne 4 Stück benötigen.
Gruß Gerald
-
Bin auch interessiert an der externen Lösung.
http://www.etotheipiplusone.net/?p=1617
Eine solche Halterung könnte ich mit der CNC aus Kunststoff fertigen.
Sieht schöner aus als vom Drucker und geht um einiges schneller.
Gruß Gerald
-
Ich bin schon auf dein Erfahrungsbericht gespannt.
Für die kleine Bauweise sind die Leistungsdaten mit den ganzen Funktionen die er bietet schon beeindruckend.
Der Preis hat mich jetzt auch schon zum nachdenken gebracht.
Aber leider brauche ich davon gleiche 4 Stück.
Gruß Gerald
-
Also mit Alien würde ich diesen nicht vergleichen.
Ich hatte schon einen Twin Alien ESC mit Sensoren für 2 Wochen im Test.
Für mich ist das ein billiger Flugregler mit dran gebasteltem Sensor Anschluss und ABS Bremse.
Können die jetzt schon Bremsen? Ich mein so wie man das bei den Car ESC gewohnt ist?
Schön linear und stufenlos?
Ich finde allein diese Argumente sind schon ausreichend:
- Regeneratives Bremsen
- potente Sinusnachbildung im 120°-Winkel über alle drei Phasen
- Anschluss für Wireless Nunchuk Wii
- Zeichnet so einiges an Daten auf zB: Strom- und Spannungsmessung für alle Phasen.
lg Gerald
-
Die Nachbarn tüfteln gerade an einem sehr interessanten ESC. :peace:
Hier einige Info:
http://vedder.se/2015/01/vesc-open-source-esc/
oder
http://endless-sphere.com/forums/viewtopic.php?f=35&t=63540&start=325
Hier nur einmal einige Funktionen aufgezählt.
Eigenschaften
- 5V 1A Ausgang für externe Elektronik aus dem Abwärtswandler auf der DRV8302 integriert.
- Spannung: 8V - 60V (Safe für 3S bis 12S LiPo).
- Strom: bis 240A für ein paar Sekunden oder etwa 50A kontinuierlich in Abhängigkeit von der Temperatur
und der Luftzirkulation um die Leiterplatte.
- Strom- und Spannungsmessung für alle Phasen.
- Regeneratives Bremsen.
- Sensored oder sensorlosen Betrieb.
- Gute Anlaufmoment im sensorlosen Betrieb (und natürlich in der sensored Modus als auch).
- Tastverhältnis Regelung, Drehzahlregelung oder Stromregelung.
- Schnittstelle zur Steuerung des Motors: PPM-Signal (RC-Servo), analog, UART, I2C, USB oder CAN-Bus.
- Wireless Nunchuk Wii (Nyko Kama) Kontrolle über den I2C-Port. Dies ist praktisch für Elektro-Skateboards.
- Optional PPM-Signal ausgegeben. Nützlich, wenn zB Steuerung eines RC Auto von einer Himbeere Pi oder
einem Android-Gerät.
- Wenn sich der Motor dreht, während der Regler ausgeschaltet ist, werden die Umwandlungen und die Richtung verfolgt. Der Arbeitszyklus, um die gleiche Geschwindigkeit zu erreichen wird ebenfalls berechnet. Dies ist um einen reibungslosen Start, wenn der Motor bereits Spinnen bekommen.
Ein echter Traum für jeden eboard fahrer. :thumbsup:
lg Gerald
-
Wenn mein Board fertig ist und das Wetter auf Sommer geschaltet hat.
Werde ich das in der Praxis Testen und berichten. :thumbsup:
lg Gerald
-
Das Pom ist nicht schlecht. Aber es ist sehr schwer. Meine Zahnräder habe ich aus diesem Material gemacht.
Polyethylen hab ich für meine Akkubox verwendet. Ist leichter und eher biegsamer. Bevor es bricht würde es sich leicht biegen. Ich Zerspanne jeden Tag unzählige verschieden Kunststoffe.
Gruß Gerald
-
Würde es bei einem 4 WD board Sinn machen. Wenn man auf ebener Strecke auf
2 WD umschalten könnte um Strom zu sparen.
Die Regler könnte ich nicht abschalten. Weil sie sonst durch den erzeugten Motorstrom den Regler in gang setzten und der die Motoren zum Bremsen zwingt.
Ich könnte nur das Regler Signal abschalten oder auch mit dem Handsender vermischen. Also 100% vorne und hinten nur 30%. Ob das aber Sinn machen würde?
Hat damit jemand schon Erfahrung gemacht?
Barney meinte dazu:
keine ganz so einfache Frage. Ich hätte da keinen praktischen Beleg. Deine Frage hatte ich auch nicht zum ersten mal. Daher die theoretische Betrachtung:
* Positiv: Energetisch gesehen, ist es egal, wie viele Antriebe für die Erbringung der Kraft (Energie) vorhanden sind es muss nur diese Kraft an sich erbracht werden.
* Negativ: es gibt Verlustleistungen in den Motorstellern, die ich hier als zu klein Vernachlässigen würde
* Negativ: Wirkungsgrad Kurve eines Motors ist nicht linear über den gesamten Drehzahlbereich, man könnte in eine theoretischen Bereich hineinkommen, wo der Motor einzeln günstiger betrieben wird.
* Positiv: Räder die über weicheren Untergrund geschoben werden müssen, sind durch den Antrieb drehwilliger.
Fazit:
Es müsste mit 4 Stromsensoren mal in der Praxis gemessen werden, um eine qualifizierte Aussage treffen zu können. Wenn alle vier angetrieben werden, hat es den Vorteil, das keine unnötigen Rückspannung vom Motor in den Motorcontroller anliegen. Meine Aktuelle Leiterplatte hat u.a. zwei Motorsteller Ausgänge für diesen Anwendungsfall. Hier kann jeder experimentieren, welche prozentualen Verteilungen wirklich Sinn machen und ob dies eine Auswirkung auf den Stromverbrauch hat.
-
Ja Drehzahlsensore schön und gut. Wer es braucht.
So weit ich bescheid weiß. Ist der Drehzahlsensor für Kunstflug im Hubschrauber bereich gedacht.
Er sollte dafür sorgen das der Motor immer die Drehzahl hält auch wenn man den Pitch erhöht. Um nicht immer per Hand nachregeln zu müssen.
Könnte man als Tempomat nutzen.
Ich meinte Hallsensoren. Die mann benötigt um einen Brushless Motor vom 0-100% ohne Ruckeln hochzuregeln. Gerade bei Offroad nicht schlecht.
lg Gerald






Hallsensoren nachrüsten
in BamBam
Geschrieben
Ich hätte den R10 gerne weiter weg vom Tellerrand eventuell den D10 auch. Wenns geht?