gerald-z
-
Gesamte Inhalte
299 -
Benutzer seit
-
Letzter Besuch
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von gerald-z
-
Hallo barney Ja wenn ich einen servo anschließe funktioniert die Steuerung einwandfrei. Scheint als ob der Regler mit der ansteuerungsfrequenz nicht ganz zu recht kommt. Gruß Gerald
-
Ich hab heute noch einmal herumprobiert. -Bei dem externen Bec habe ich 5 Volt eingestellt. -Auch eine Ferritring habe ich als Entstörung versucht. -Kondensator habe ich einen 16 Volt 100µf verbaut. -Das Rc Kabel ist auf der Platine öfters angelötet damit es nicht verrutscht. Im nachhinein gesehen macht es nicht viel sinn. - Ich Teste immer nur mit einem Motor und Regler. Ein Motor braucht etwas mehr Strom (China) mit dem es noch schlechter funktioniert als mit dem anderen der weniger Strom braucht. -Ich hab das Arduino mit einem externen 5 Volt Akku versorgt. -Akku Aufgeladen Hat alles nichts gebracht. :confused5: Ich werde das Arduino ohne meiner Platine mit Stecker verkabeln und Testen. Wenn das auch nichts hilft dann kann es nur am Arduino oder am Programm liegen. Oder hat jemand noch eine andere Idee. Gruß Gerald
-
Danke Beatbuzzer Das mit der Hupe und dem Transistor funkt perfekt. Leider ist das aber das einzige was funktioniert. Wenn ich wegfahren will (Regler ezrun 150a ohne Sensoren) dann beschleunigt das Board mit ruckeln auf ca 1km/h dann kommt ein kurzes Hupen und dann schalten der Motor wieder ab. Öfters kommt es dann auch vor das der Motor nach dem Hupen nicht abschaltet sondern er ungebremst weiterläuft. Dann hilft nur den Wii Controller abschaltet und ca 30 sec wartet bis der Motor ausgeht. Mir kommt es so vor als ob es mit der neuen Programm version noch schlechter geworden ist. Ich hab schon probiert einen Kondensator vorm Arduino zu löten. Den Strom vom Regler Bec zu verwenden. Mit einem Widerstand von 6 Volt auf 5,4 Volt. Eine Diode zwischen BEC und Arduino. Die Hupe abgeschlossen. Das hat alles nichts geholfen. Welche GND ich beim Arduino verwende ist doch egal oder? Mit dem Servotester den ich vorher hatte bin ich ohne Probleme schon ca 200km gefahren. Kein Problem beim anfahren oder abschalten von den Reglern. Gruß Gerald
-
Danke für die Zeichnung. Ich versorge das Arduino board mit diesem bec. http://www.hobbyking.com/hobbyking/store/__18521__Turnigy_HV_SBEC_5A_Switch_Regulator_8_42V_input_.html Aber wahrscheinlich wird die Masse nur durch geschliffen. Ich werde das mit dem Messgerät prüfen ob die Masse ein Durchgang hat. Kann ich dan meinen Transistoren C546B verwenden? Ich nehme an das der SG1 die Hupe ist. Bei dem + Anschluss kann ich dann den 6S Akku drauf hängen. Gruß Gerald Gruß Gerald
-
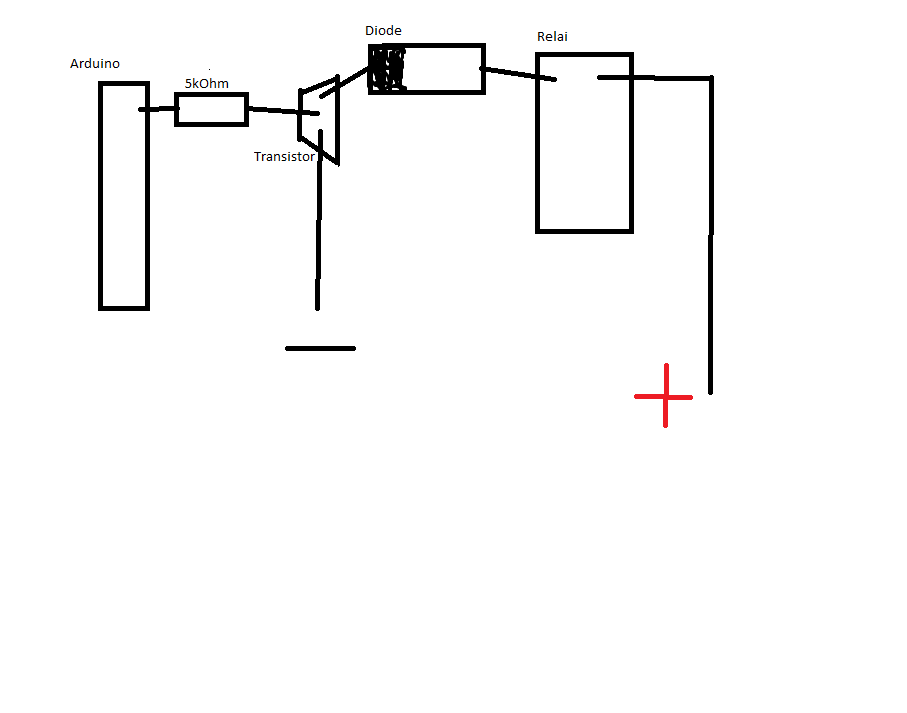
http://www.elektro-skateboard.de/forum/attachments/eigenbauten-95/wii-nunchuck-mit-ardruino-878d1378386240-unbenannt.png Ich weis die Schaltung ist umständlich aber ich weis nicht wie ich die hupe mit 25 volt versorgen kann und das arduino ja nur 5 volt hat. Die Schaltung ist so wie die obere Grafik nur das die Diode jetz paralell mit dem Relais hängt. Leider hab ich es nicht so drauf was das elektrische betrifft. Gruß Gerald
-
Hallo Auf meinem Transistor steht C546B, W82. Bei der Hupe handelt es sich um diese hier: http://www.conrad.at/ce/de/product/716817/Piezo-Summer-Geraeusch-Entwicklung-92-dB-3-30-VDC-Inhalt-1-St Geschaltet wird die Hupe von einem Relai. Gruß Gerald
-
Danke barney Ich hatte heute wegen der Arbeit leider nicht Zeit. Morgen werde ich das neue Programm von dir ausprobieren. Gestern ist es mir wider passiert das ich nicht mehr stehen bleiben konnte. Das arduino dürfte sich beim anfahren durch ein kurzes hupen aufgehängt haben. Ich hab dann den wii controlle ausgeschaltet. Nach ca 10sec ist dann der Motor ausgegangen. Es muss etwas mit der Stromversorgung zu tun haben. Passiert wenn dann nur beim wegfahren. Der wii Controller schaltet bei mir während dem fahren leider öfters in den sleep Modus. Gruß Gerald
-
Danke jetzt hab ich es als anti Elektriker verstanden. Benötige ich den Widerstand zwischen Transistor und Ardiuno überhaut? Gruß Gerald
-
Das mit den Röntgenaugen dachte ich mir schon. Mit der Wikipedia Zeichnung konnte ich nicht nichts anfangen. Auch mit der Beschreibung nicht. Dann habe ich bei Google gesucht und bin auf etliche verschiedene Schaltungen gestoßen. Was eine Freilaufdiode angeht. Ich habe gerade ein bisschen gezeichnet um es verständlicher zu machen.

-
Ich hab den Igel auf auf 3400 erhöht und es funktioniert wirklich gut. Das hat mit dem Anlernen nichts zu tun. Wenn ich beim Regler die Nullposition ohne drücken der Z Taste anlerne da habe ich später auch den Leerlauf bei losgelassener Taste. Dafür ein leichtes bremsen bei gedrückter Taste. Bei igel ist das noch stärker. Wenn ich den Regler sage das die Nullposition mit gedrückter Z Taste ist. Kann ich die Z Taste später nicht loslassen da sonst das board von selber davon fährt. Aber ich bin trotz der leichten bremse glücklich. Da ich so immer weis das, das board eine verbindung mit dem Controller hat und ich jeder Zeit brems bereit bin. Bein meiner Hupe habe ich irgend wo noch einen Murks drin. Wenn ich fahre geht öfter die Hupe kurz an. Eine Diode habe ich auch eingebaut. Ich hab sie zwischen Transistor Collector Ausgang und Reilai gehängt. Stimmt das so? Und zwischen Arduino und Transistor (Basis) einen 5kOhm Widerstand gelötet. Kann es sein das der zu klein ist und dadurch die Hupe öfters angeht. Gruß Gerald
-
Beim mir funkt das nicht. Wenn ich den Igel aktiviere verschiebt sich die Neutralstellung so stark das der Regler auf bremse geht. Bei Vollgas bin ich dann in der Neutrallstellung. Gruß Grald
-
Jetzt hab ich es kapiert. :thumbsup: Beim test mit dem Servo verschiebt sich durch den Igel die Neutralstellung ein bisschen. Werde das gleich am Baord testen Gruß Gerald
-
Sorry ich versteh gerad nicht was ich ändern oder löschen soll? Gruß Gerald
-
Ich dummi hab seit längerem nicht in meiner email nachgesehen. Habs bekommen. Werde es gleich Testen. Sorry gruß Gerald
-
Den Abschnitt vom Programm den du gerade geschrieben hast ist in meinem Programm noch gar nicht enthalten. Wo soll ich den hineinkopieren? Gruß Gerald
-
Hallo Barney Ich habs gerade erfolgreich an meinem Baord testen können. Und es funktioniert einwandfrei. Mir ist aufgefallen das sich die Neutralstellung bei gedrückter Z Taste ein bisschen verschiebt. Wenn man die Z Taste gedrückt hält bremst das Board leicht erst wenn ich sie loslasse ist der Freilauf drin. Das stört mich allerdings nicht und kann so bleiben. Den Igel habe ich trotz dem noch nicht aktivieren können. Stick nach links und dreimal die Z Taste drücken hat bei mir nicht funktioniert. Den Widerstand auf A0 habe ich auch schon eingelötet (5kOhm) Danke! Gruß Gerald
-
Ich habs gerade mit einem Servo getestet. Bremse geht perfekt. Beim Beschleunigen ist mir aufgefallen das wenn ich den Stick loslasse öfter der Servo die Neutralstellung nicht findet. Erst wenn ich die Z Taste loslasse kommt er wider zurück. Wo kann man jetzt den Hasen Igel finden? Oder sind die zwei noch im Käfig eingesperrt? Werde morgen das mal am Board Testen. Gruß Gerald
-
Horcht sich wirklich gut an. Mein Board mit 2x C6374 leisten mit 6s 2670 Watt maximal. Wenn man auf dem Board gerade oben steht und man die maximale Beschleunigung aktiviert reicht es für einen Willi. Gruß Gerald
-
Hallo Danke das du das so schnell umgesetzt hast. Ich bin gerade nicht Zuhause um es auszuprobieren. Aber man kann damit schon linear beschleunigen oder? Ich mein jetzt so wie mit einer rc Funk. Gruß Gerald
-
Ich hab das jetzt so probiert: // Subroutine fuer die Motorsteuerung void Motorsteuerung(){ // Beschleunigen bei gehaltenen Z-Knopf und überschreiten des Oberern Totpunktes if (nunchuk.zButton == HIGH && nunchuk.analogY > ObererTotpunkt && F_Ueberstrom == LOW){ // StellWertMotor=StellWertMotor+((nunchuk.analogY-NeutralstellungYAchse)/BeschleunigungsDaempfung); StellWertMotor = nunchuk.analogY-1000/NeutralstellungYAchse; // direkte Ansteuerung if (StellWertMotor > ObererStellWertMotor) StellWertMotor = ObererStellWertMotor; // obere Grenze fuer den Motorregler........ hat sich nichts verändern. Gruß Gerald
-
Ich blicke gerade nicht ganz durch wo ich das ändern soll? Gruß Gerald
-
Hallo Barney hab soeben das Programm probiert und es funktioniert nicht so recht. Getestet hab ich das ganze mit einem Servo. Bremse funktioniert. Wenn ich die Z Taste drücke und ein bisschen gas gebe. Dreht der Servo bis er ansteht und die Zahnräder knarren. Erst wenn ich die Taste loslasse geht er wider in Grundstellung. Danke das mit der Hupe werde ich noch ändern müssen. Ich hätte auch einen Mosfet wo drauf steht CDIL, BD243C, G1 kann ich mit dem direkt die Hupe ansteuern 25 Volt? Gruß Gerald
-
Hallo Barney Nein ich bin noch am Leben. Ich hab dich falsch verstanden. Ich dachte du korrigierst die beiden Zeilen und schreibst es hier noch mal rein. Um dich nicht zu stressen habe ich dann auf eine Antwort gewartet. Am Nachmittag musste ich dann in die Arbeit. Das zweite Relai ist direkt an 5 Volt angeschlossen und Schaltet sobald der Bec 5 Volt liefert. Das benötige ich um die Lipo Anzeige mit einzuschalten. So brauche ich nicht immer den Balancer Anschluss abzuziehen. Das erste Relai (für Hupe) wird von einem Transistor angesteuert der mit dem Basis Anschluss über ein 5kOhm an das Arduino Board angeschlossen ist. Durch den Transistor sollte keine Überspannung zurück zum Arduino kommen. Das mit dem Dämpfungswert werde ich auch noch probieren. Kann du vielleicht bei Gelegenheit die "Hase - Schildkröte" Funktion mit programmieren? Ich stell mir das ca so vor: Beim einschalten ist automatisch die "Schildkröte" aktiv und das Board hat nur die halbe Geschwindigkeit. Durch Tastenkombination zb: Joystick rechts und gleichzeitig dreimal die Z Taste drücken wird die "Hase" Funktion aktiv. Das Board läuft jetzt mit maximaler Geschwindigkeit. Mit der Selben Tastenkombination könnte man das ganze wider deaktivieren. Gruß Gerald
-
Danke sehr net von dir. Wenn du willst kann ich es gleich testen. Bin gerade am werkeln. Gruß Gerald
-
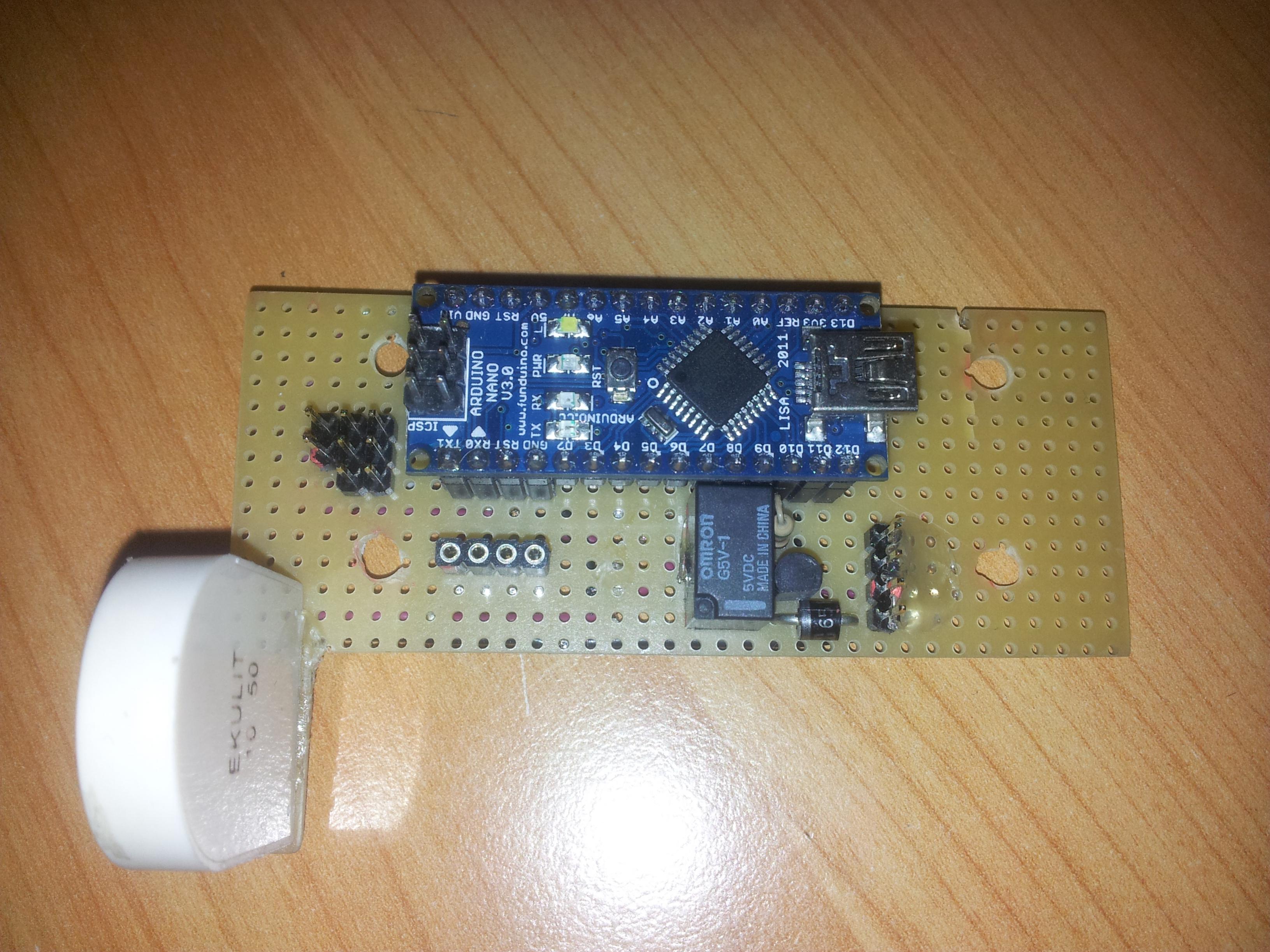
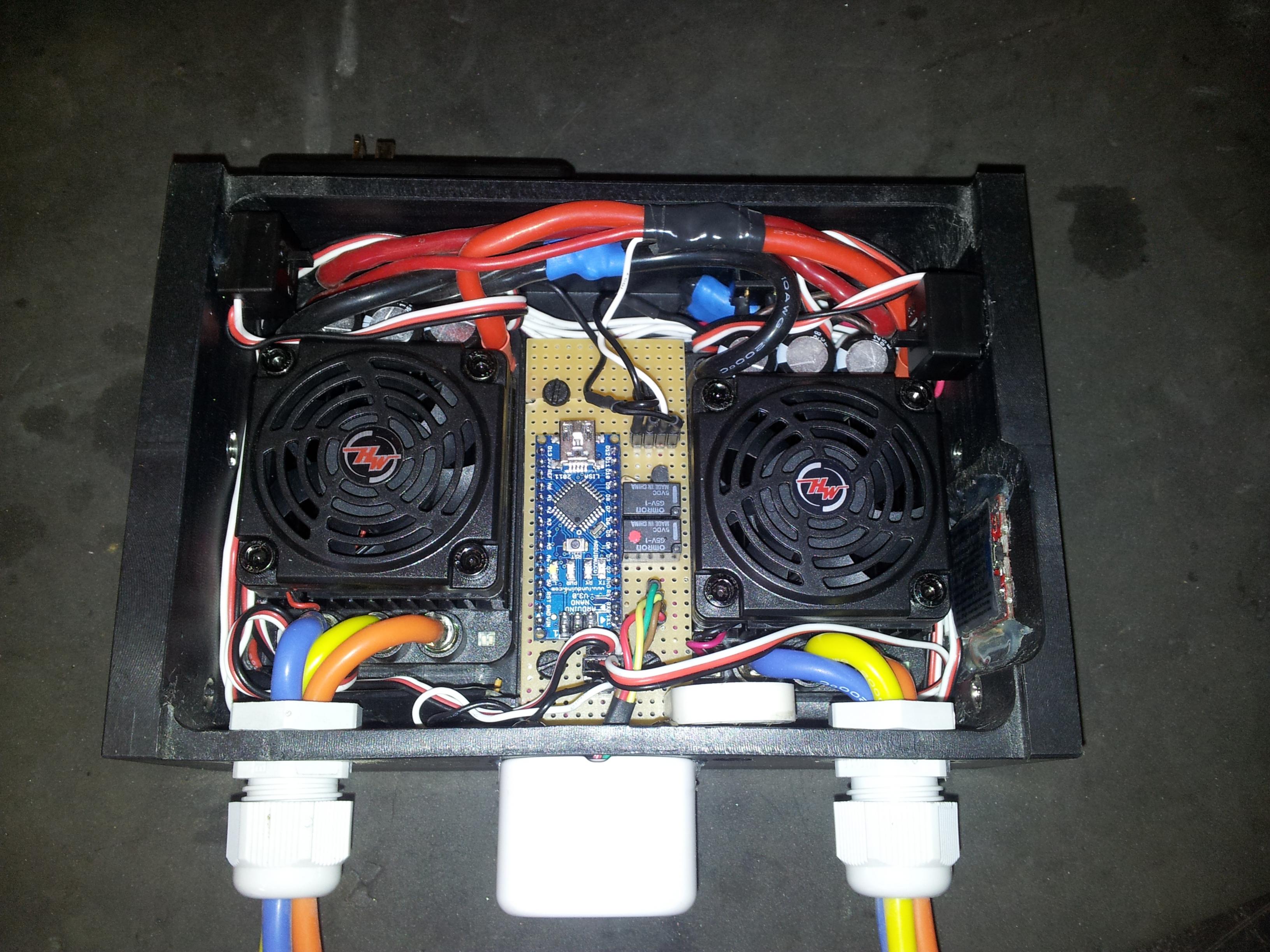
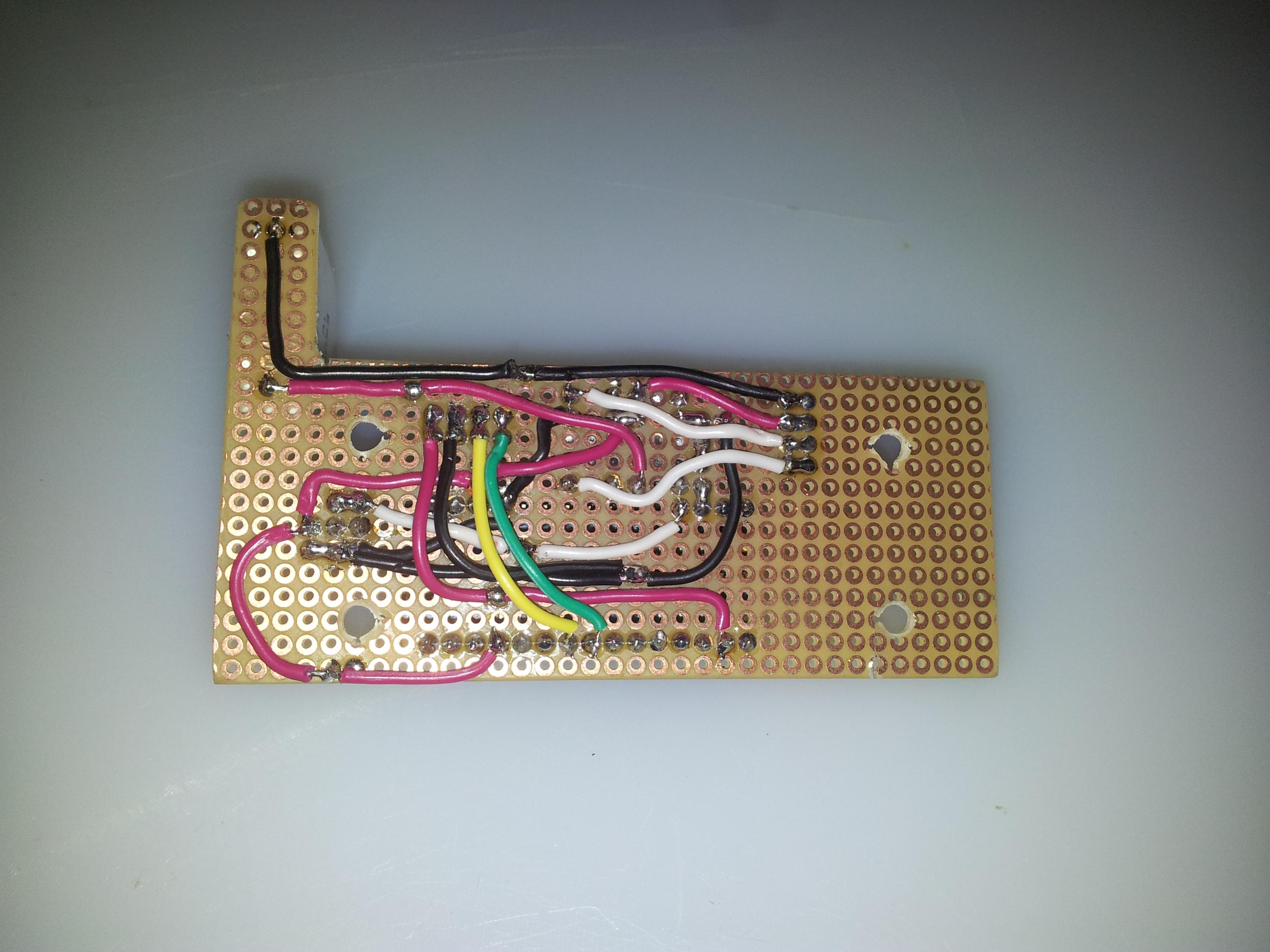
Danke Barney für die schnelle und hilfreiche Antwort. Den Regler habe ich nach dem einbau des Arduino Board neu angelernt. Im trockenen funktioniert ja auch alles perfekt. Aber wahrscheinlich wird es an dem zu sanften Anlauf liegen mit dem der Regler beim bergauf wegfahren überfordert ist. Die Stromversorgung über den externen BEC hat 5,1 Volt. Zum probieren ob es etwas ändern würde wenn ich den Strom vom Regler nähme fällt flach weil da 6 Volt rauskommen. Um die direkte Ansteuerung zu benutzen habe ich den Quellcode der gesamten Motorsteuerung herausgelöscht und den neuen hier im Forum geschriebenen hineinkopiert. Leider geht jetzt nur mehr die Bremse. Keine Reaktion auf vollgas. Version zwei mit den zwei Zeilen austauschen hat auch nicht funktioniert. Hier ein Bild von meinem Werk. Gruß Gerald