hexakopter
-
Gesamte Inhalte
128 -
Benutzer seit
-
Letzter Besuch
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von hexakopter
-
Das hört sich doch gut an. Komme ich mal drauf zu sprechen wenn ich es selber noch mal intensiver versuche wenn ich mit dem Video Logger rumspielen möchte. Die VESC Firmwares kompilierst du auch selber? Hab glaube ich irgend eine veraltete "gcc-arm-none-eabi" bei mir laufen. Muss ich dann mal sehen ob es trotzdem läuft. Durch kompiliert hatte er meine ich. Habe ich nicht irgendwo gelesen du hast das unter Eclipse gemacht? Wäre schön zu wissen was man dafür noch alles installieren muss.
-
@barney Mein Englisch war wohl doch zu schlecht. Du hast jetzt ja schon eine Antwort bekommen. Ich weiß nicht wie lange das bei dir mit den ESP8266 her ist, aber da wird ja auch immer mehr daran gebastelt. Was eigenes habe ich dafür aber auch noch nicht geschrieben. Das flashen an sich war schon komisch genug. @Dude Dein angesprochener Punkt c) ist genau das was ich meinte. Beides zusammen ist etwas übers ziel hinausgeschossen meiner Meinung nach. Ich bin denke ich erst mal nicht dabei nen Raspberry mit ans Board zu schrauben, weil ich erst mal dazu kommen muss die VESCs fertig zu löten, am besten ein Nunchuk fertig zu bekommen und das Board selbst auch noch lackiert und mit Akkus versorgt werden muss. Außerdem finde ich nen RPi etwas oversized. Ich werde irgendwie versuchen was kleineres zum laufen zu bekommen. Z.B. habe ich hier noch Dual Bluetooth Module die sowohl BT2.0 als auch BT4.0 (also BLE) sprechen. Das ganze soll auch dual laufen können. Ziel wäre es also den Nunchuk über BT2.0 zu verbinden als TX und dann z.B. das Handy über BT4.0 als RX zum loggen. Bin mir noch nicht ganz sicher ob das so klappt. Werde ich zu gegebener Zeit mal testen.
-
Ich kann eurer Diskussion nicht so ganz folgen. Wozu sollte man einen Wixel benutzen, wenn man vorhat sowieso eine Raspberry PI 3 (mit WLAN und BLE) zu benutzen. Ergibt meiner Meinung nach keinen Sinn. Entweder Wixel (mit selbst programmierten Funktionen was ihr auch immer vorhabt) oder einen Rpi 3 über den man dann direkt über das Handy Wlan/Bluetooth oder über ein in einem Nunchuk verbauten HM-10 Bluetooth oder ESP8266 WLAN Modul (Welches man wie den Wixel übrigens auch selbst programmieren kann und an sich somit auch eigenständig nutzen könnte) zugreifen könnte. Eure RT Diskussion verstehe ich auch nicht wirklich. Ihr sprecht so als sei RT eine eigene Programmiersprache, aber wenn ich es richtig sehe bezieht ihr euch nur auf Real Time, also ein Echtzeitsystem. Mit "MOSI und der andere Kram ist schon vorhanden" meinst du vermutlich, dass ein onboard SPI vorhanden ist. Damit außen stehende das auch nachvollziehen können. Der LM2596 ist übrigens nicht für 60V ausgelegt.(Maximum Supply Voltage 45V)http://www.ti.com/lit/ds/symlink/lm2596.pdf EDIT.: Deine Frage "Is it possible the BLDC Tool GUI offer by WEB-Server?" aus dem VESC Forum verstehe ich übrigens auch nicht. Entweder mein Englisch ist zu schlecht oder der Satz ist kein Englisch. Vielleicht beschreibst du dort ausführlicher was du meinst.
-
Nein, bei U>Umax wird nur wegen des Stroms nichts zerstört, so lange er sich nicht durch zu hohe umgesetzte Leistung (wo der Strom natürlich auch mit eingeht) zu stark erhitzt und schmilzt. Um so höher die Spannung um so schneller Dreht der Motor. Heißt er kann dir bei zu schneller Drehung (zu großer Spannung) um die Ohren fliegen. Wildes schätzen ist immer gut.... P = U * I Wenn du also gleiche Leistung haben möchtest muss entsprechend der Strom größer sein.
-
@kielkarl Schaut gut aus. Sehe spontan nichts fehlerhaftes warum er nicht laufen sollte. Bin ich mal gespannt wenn dein STLink eintrifft. @barney Könntest du vielleicht noch näher erläutern warum man seinen VESC mit einem Update über USB killen kann? Vor allem warum es mit Linux/Mac OSX nicht so sein sollte. (Lese ich indirekt aus der extra Angebe von Windows) Nicht, dass es mich betreffen würde, aber es würde mich interessieren warum das der Fall sein soll.
-
Vielen Dank. Jetzt scheint es zu funktionieren. Ging ja richtig fix.
-
Wenn ich es richtig sehe gibt es ein Bug in der "Neuste Threads" Region. Die verschobenen Threads die jetzt unter VESC zu finden sind erscheinen nicht mehr in dieser Liste. Wäre schön wenn das gefixt werden könnte. :thumbsup:
-
Warum freuen?
-
@kielkarl Glückwunsch. Wäre schön wenn du später vielleicht noch ein Foto machen könntest. Die wohl einfachste Möglichkeit ist es über einen STLink zu flashen. Da jeder STM sich meiner Meinung nach aber auch über den UART1 Port Programmen lässt wäre es vermutlich auch über einen UART1 Port möglich. Problem dabei ist, dass du den BOOT0 Pin und den Reset toggeln können müsstest. Hab grade mal ins Datenblatt geschaut. Benjamin hat BOOT0 (STM Pin 60) leider direkt auf Masse liegen. Müsste man löttechnisch bisschen rumfrickeln um den Schaltbar zu machen. Reset (STM Pin 7) ist am SWD Port (P2) rausgeführt. UART1 RX/TX sollten wohl Pinne 42 und 43 sein (H1 und H2). Die sind aber über den Filter an dem Hallsensor Port herausgeführt, würde also auch noch einmal zum entfernen von ein paar Rs und Cs führen. Alles in allem wohl ziemlich kompliziert und eher nicht zu empfehlen. Vielleicht kennst du ja irgend jemanden der einen STLink Programmer hat. Sind auch auf den STM Development Boards vorhanden.
-
Es wird wohl noch keiner eine "fertige" funktionierende Version haben, da man die Teile noch nirgends kaufen kann. Wenn ich es richtig verstehe will ollinboard bald ein paar fertige verkaufen. Man muss sich das Teil also momentan selber zusammen bauen. Und ja es ist wohl noch im "Entwicklungsstadium", aber das ist ja eigentlich auch der VESC.
-
Longboard Eigenbau, KHEPRI 46" Bamboo-Maple Board
hexakopter antwortete auf Bruce Lee's Thema in: Eigenbauten
Das wäre wirklich gut zu wissen. Meine Prognose ist, dass mindestens 90% FOC genutzt haben. Vermutlich sind auch viele ohne den C18 fix unterwegs gewesen. -
Hier kann ich eigentlich auch die Worte aus einem andren Thread drunter setzen: Ich persönlich glaube übrigens nicht, dass es daran liegt, dass die verwendeten Motoren nur bis 10s spezifiziert sind.
-
Longboard Eigenbau, KHEPRI 46" Bamboo-Maple Board
hexakopter antwortete auf Bruce Lee's Thema in: Eigenbauten
Darf man fragen wo du dein VESC gekauft hast, um welche Hardware Version es sich gehandelt hat und welche Software du drauf hattest? Ich frage mich auch warum Leute die ein funktionierendes System haben wollen sich an so experimentelle Sachen wie Field Oriented Control wagen. Bei den ganzen anderen Reglern (z.B. Alien) gibt es garkein FOC, also warum etwas experimentelles ausprobieren was grade noch viel getestet und weiterentwickelt wird, anstatt auf bewährte Methoden zu setzen. Ich bin auch jemand der gerne volles Potential aus einem Produkt schöpft, also alles testen was so geht, dabei bin ich mir aber auch im klaren, dass etwas kaputt gehen kann wenn man den "Beta-Tester" spielt. -
Was ich so gelesen habe, haben es schon ein paar Leute gemacht. Bist du denn sicher, dass dein DRV8302 noch heile ist?
-
Danke für die Rückmeldungen. Warum die von der Post das in die bedruckte Plastik Tüte gesteckt haben war mir auch ein Rätsel. Auf Nachfrage hieß es nur das muss so... Habe mir eher vorgestellt da wird direkt ein Zettel ausgedruckt der auf der Rückseite klebt. Aber nun gut, es sind ja laut Sendeverfolgung alle Pakete angekommen. Das die Dauer noch etwas mit dem Zoll zu tun hat glaube ich eher nicht. Würde mich über einen Bericht von euch freuen wie es bei euch dann mit dem Bestücken so klappt. Vielleicht hätte das dann sogar einen eigenen Thread verdient.
-
Kannst ja auch einfach mal den Strom den der Raspberry zieht messen oder im Internet danach suchen. Der Schaltregler des DRV8302 ist laut Datenblatt bis 1,5A vorgesehen. Da du noch die VESC Elektronik auch damit versorgst und ich immer etwas reserve lassen würde, würde ich einfach mal behaupten alles unterhalb von 1A sollte passen. Da liegt der Raspberry ja wohl auch drunter. Bin ich ja mal gespannt wie es bei dir funktioniert.
-
@BenSkywalker Ja, hätte ich vermutlich noch. Habe leider keine Zeit in den nächsten Tagen zu verschicken. Kannst dich trotzdem mal per PN bei mir melden. @all Habe mir schon Sorgen gemacht, dass was mit dem Versand schief gelaufen ist, weil bis heute morgen keine der Trackingnummern weiter fortgeschritten war als am Donnerstag Vormittag schon. Hatte schon den Angestellten der Aachener Hauptpost im Verdacht was falsch gemacht zu haben. Jetzt sollen aber wohl ein paar Pakete morgen bei euch ankommen. Tut mir Leid aber ich kann ja nicht ahnen, dass es so lange dauert wenn es heißt normal wird am nächsten Tag geliefert. Hoffe ihr versteht das.
-
Wenn ich es richtig verstehe bekommst du es unter OSX compiled oder? Ich habe opencv installiert, jedoch bekomme ich in QT immer die Meldung, dass er "opencv/cv.h" usw nicht findet. Habe dann mal geguckt wo die Files bei mir liegen und alle includes mit deinem richtigen Pfad ausgetauscht. (Waren bestimmt 100 Stück...) Trotzdem bekomme ich noch einen Haufen Fehler ausgegeben. Wie bist du vorgegangen?
-
So Päckchen sind jetzt bei der Post abgegeben. Das Geld des Versands eines Pakets musste ich erst einmal aus eigener Tasche Zahlen, weil es wohl zu einem Missverständnis kam. Durch die eine eingegangene Spende ist das aber wieder drin. Vielen dank dafür. :peace: Hoffe mal das alles zügig und heile ankommt. Die Angestellten bei der Post wussten natürlich wieder nichts von ihrem Angebot die Adressen schon im Internet einzugeben und zu bezahlen und dann mit nem QR Code zur Post zu gehen. Das einlesen des Codes hat natürlich typischer Weise nicht funktioniert, aber letztendlich sollte alles korrekt geklappt haben. Ich sende euch dann mal eure Tracking-Nummern zu. Viel Spaß mit den Teilen.
-
Ich dachte schon erst du beschwerst dich über die kleinen "Beinchen" am FET. Da wollte ich schon schreiben guck dir mal lieber den Treiber oder den STM an. Denke deine Frage wurde jetzt ja schon gut beantwortet. Päckchen wollte ich jetzt morgen früh zur post bringen, aber ich warte noch auf den Eingang einer Überweisung. Blöd weil ich die anderen nicht länger aufschieben möchte, aber auch ab dem Wochenende keine Zeit mehr habe um es dann noch mal einzeln rumzubringen...
-
So, sind jetzt endlich da. Schauen ganz gut aus. Wäre schön, wenn ihr dann zeitnah überweist, damit ich nicht so häufig zur Post muss, da ich bis jetzt erst von einer Person das Geld erhalten habe.

-
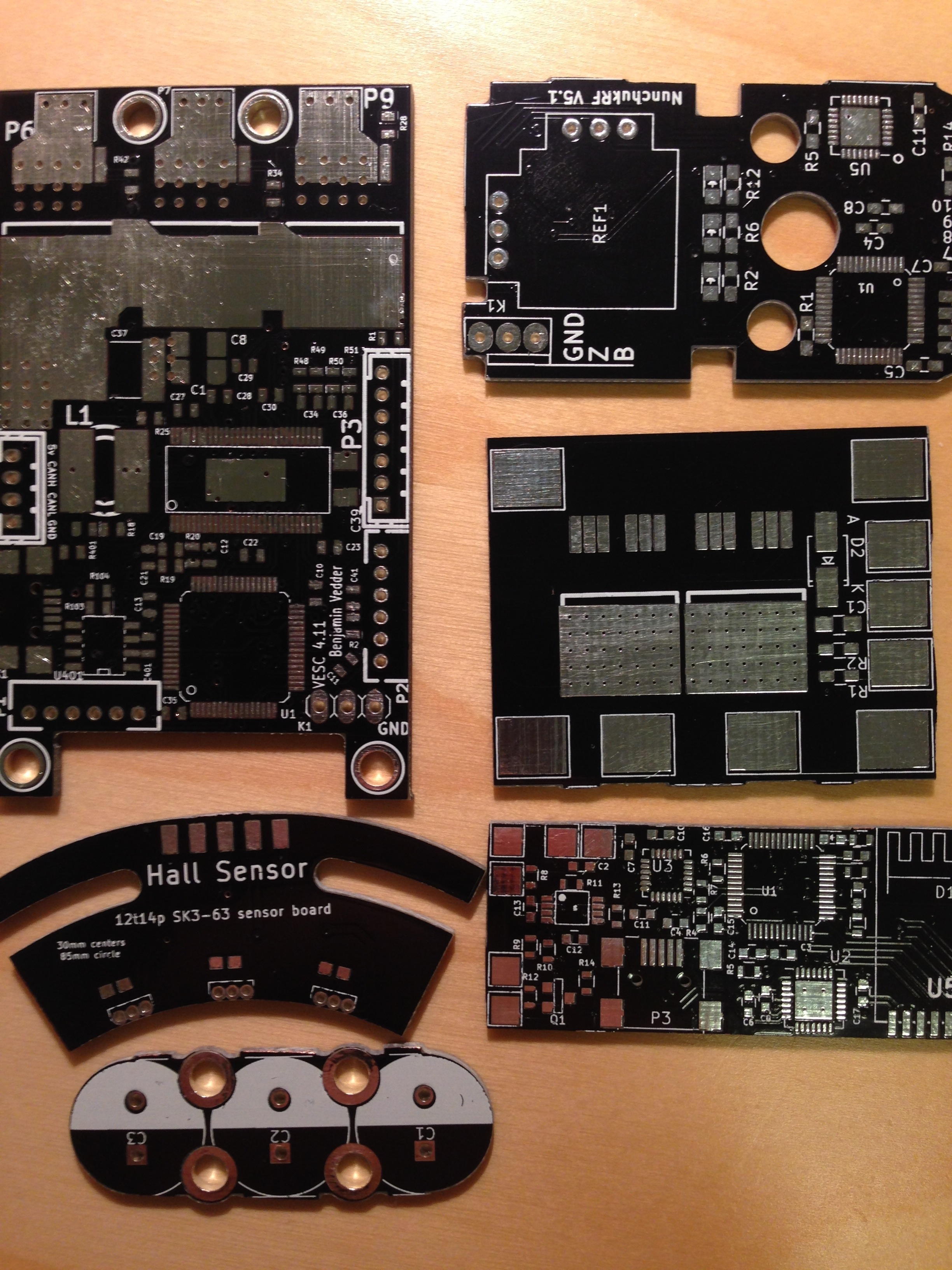
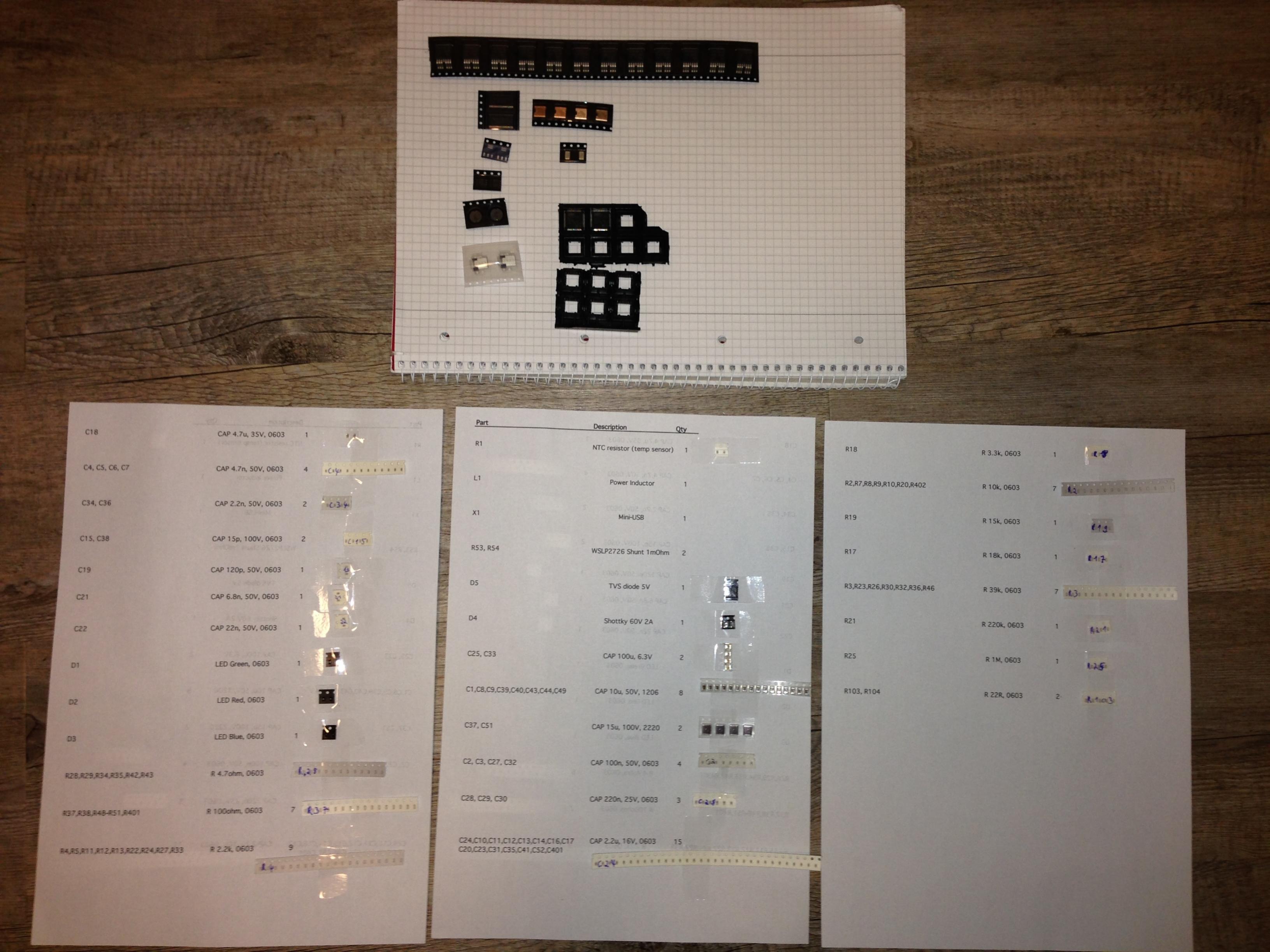
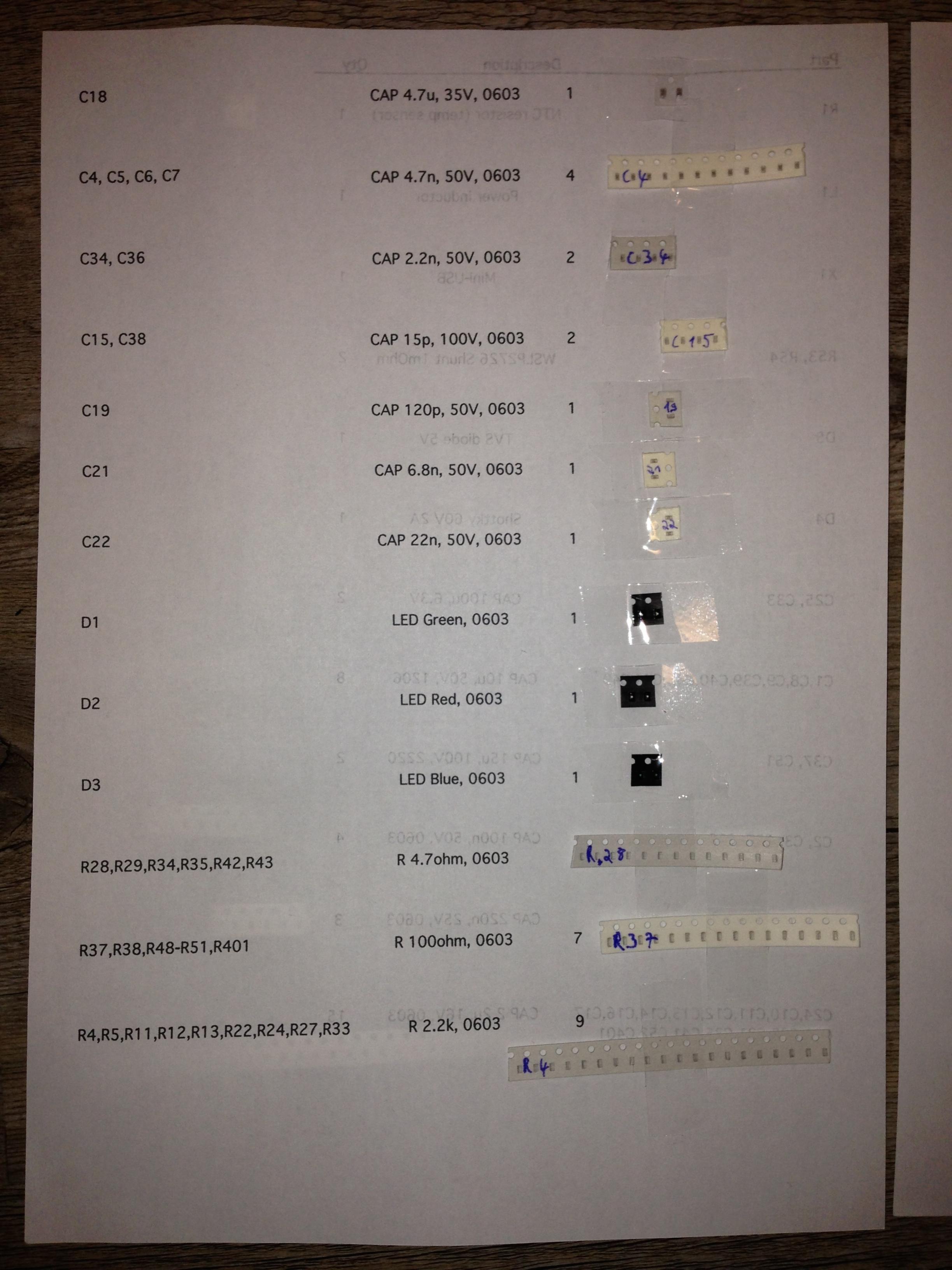
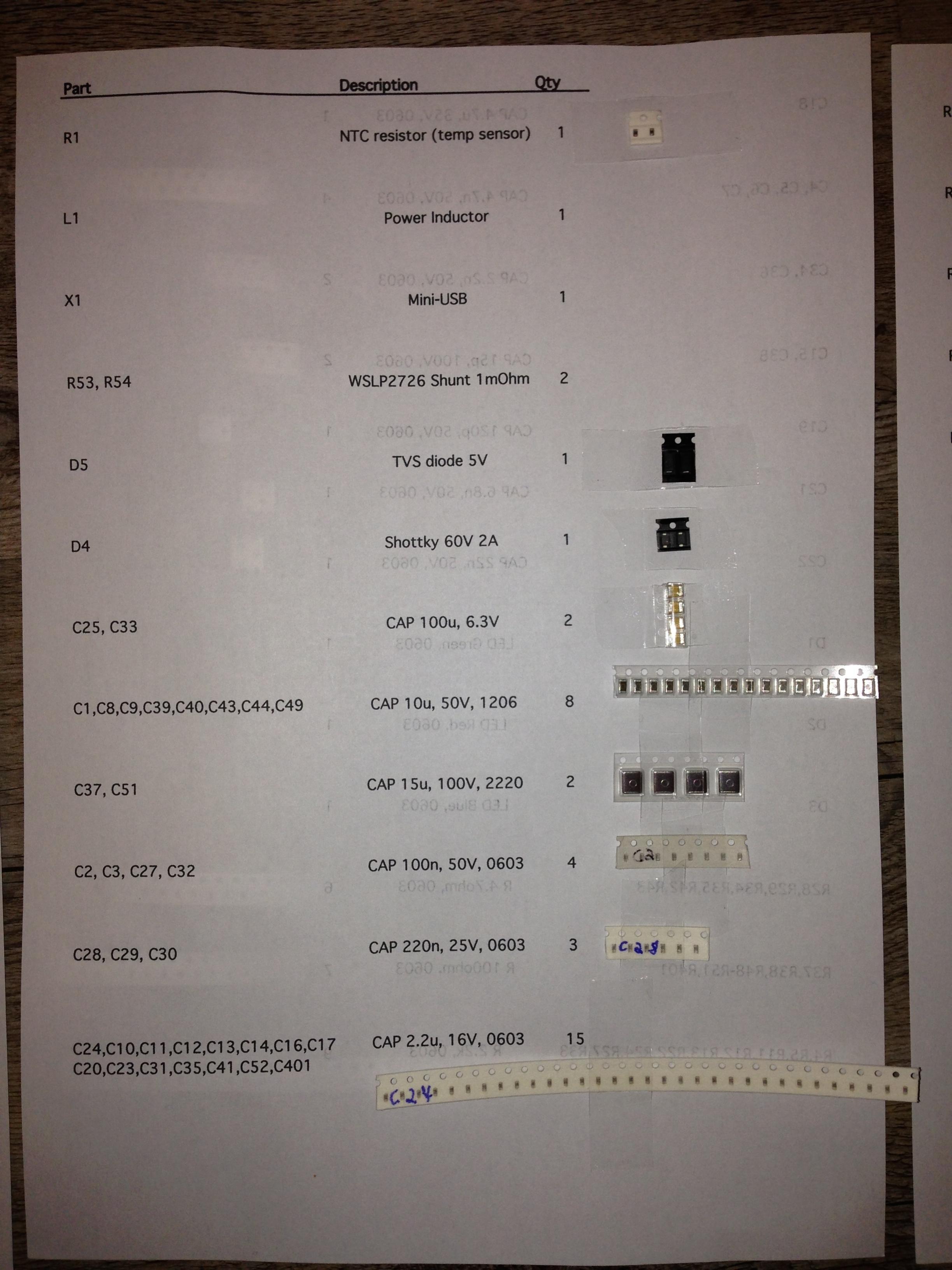
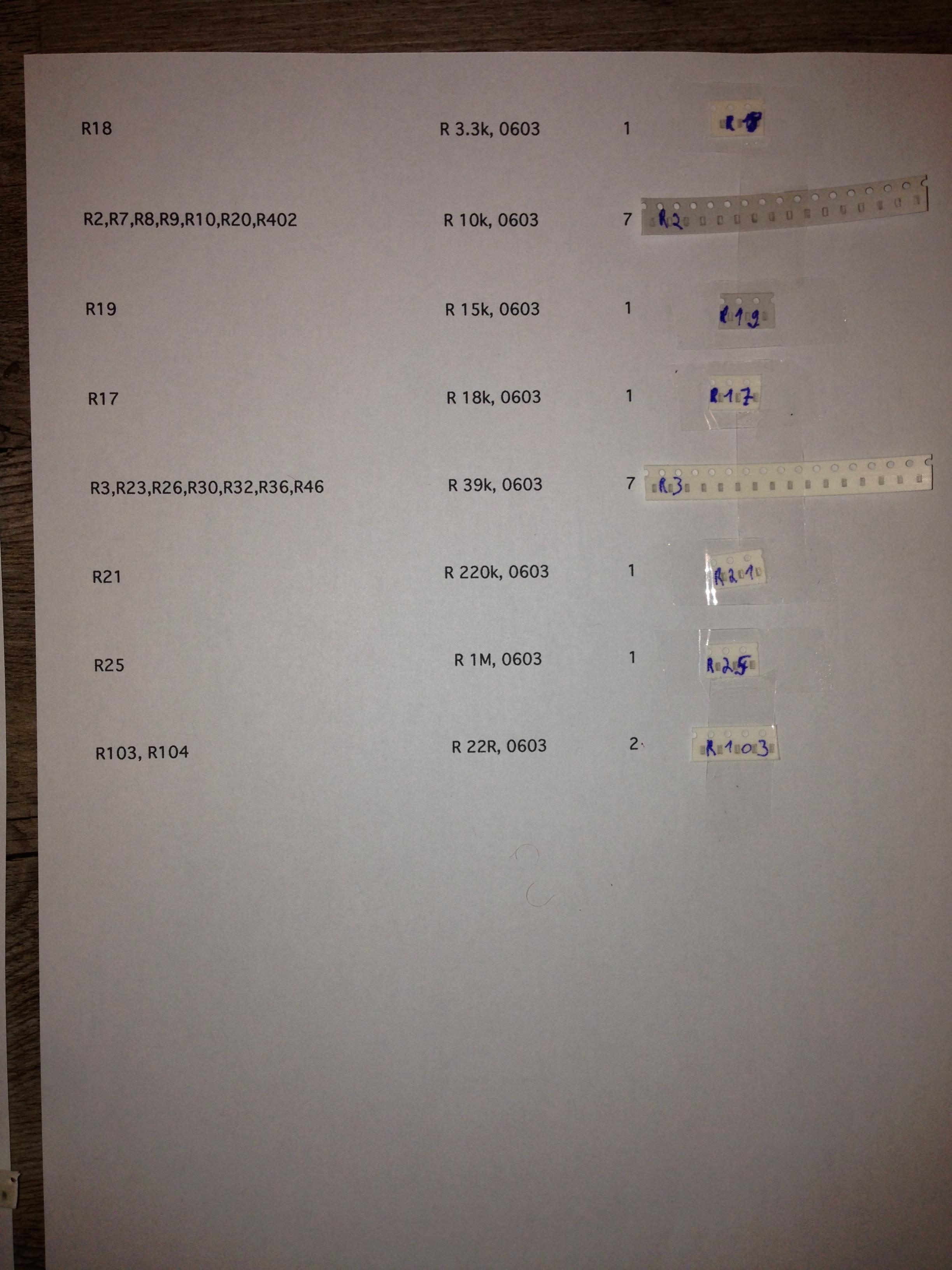
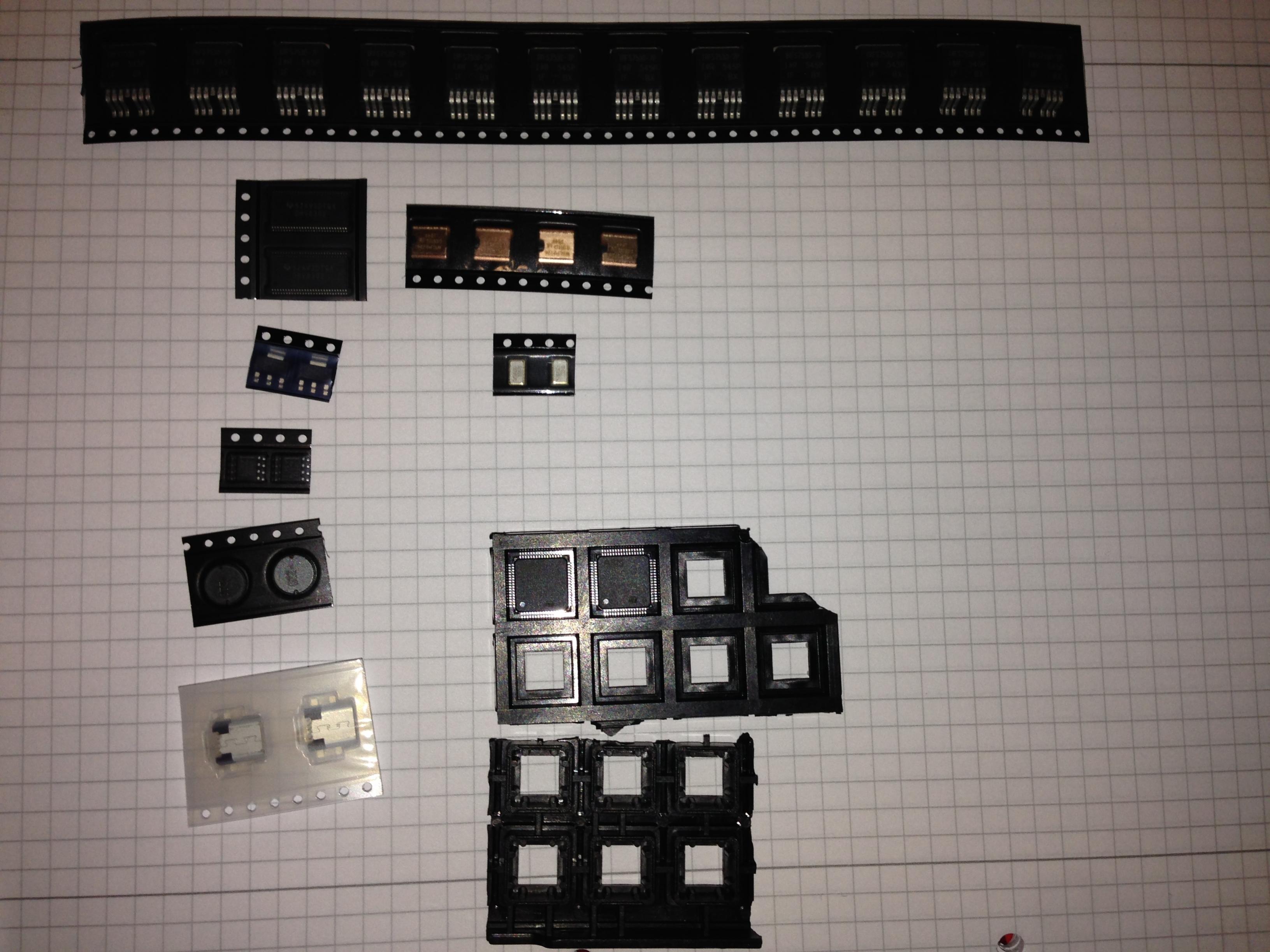
Da habe ich glaube ich eine ziemlich nette Nachricht für dich. Habe heute den ganzen Tag über mal wieder mit der Bestellung verbracht und die Sachen so zusammengestellt, wie ich mir das vorgestellt habe. So wie auf den Bildern dargestellt solltet ihr auf jeden Fall die richtigen Sachen finden und es zu keiner Vertauschung kommen. Cs und Rs sind noch jeweils mit der ersten Widerstands und Kondensator Zahl markiert, falls das ganze doch aus unerklärlichen gründen von dem Blatt gelöst wird. Oben im ersten Bild seht ihr die Bauteile, die ich in ein Anti-Static Beutel stecken werde, damit auch ja alles schön heile bleibt. Auf den Bildern ist übrigens ein Set für 2 VESCs abgelichtet. Ein Set besteht dann aus zwei Blättern (das erste ist von Vorderseite und Rückseite beklebt, fürs Bild also ein zweites Set dazugenommen) und dem Anti-Static Beutel. Bei den Rs ist immer mindestens einer zu viel dabei und bei den Cs je nachdem um wie viele es sich handelt und ob ich genug bestellt hatte. Könnt euch wohl denken, dass da bei 11 VESCs ganz schön was zu tun war. Bei den Platinen sieht es so aus, dass sie morgen kommen. Freue mich schon riesig. Da ich schon eine Anfrage bekommen habe. Ja ihr dürft auch gerne noch etwas Spenden für die ganze Arbeit die ich mir hier mit euch mache. Das ganze aber nur auf freiwilliger Basis. So eine Schnapsidee hab ich hoffentlich nicht noch einmal. Aber bitte vergesst nicht auch an Benjamin Vedder etwas zu spenden, denn ohne seine Arbeit (die wohl viel bemerkenswerter ist) würde das ganze Projekt jetzt nicht stehen. Könnt mir also jetzt das Geld überweisen, dann gehen die Sachen denke ich Mitte der Woche raus, wenn mit den Platinen alles ok ist. Bitte entschuldigt die Qualität der Bilder. Sind nur mit dem Handy geknipst.
-
Du hast den Anschluss der HW Version 4.11 gefunden. Der hat nämlich einen komplett rausgeführten SPI. Kannst du nicht auf deine Version übertragen. Das sollte übrigens auch der gleiche Anschluss sein, wie ich ihn hier ein paar posts vorher beschrieben habe.
-
@rose Ich glaube du bist jemand, der daran Schuld ist, dass man sich keine Bauteile mehr samplen kann, die man sonst nirgendwo kaufen kann. Die Firmen hören auf so großzügig zu sein, weil irgendwelche Leute meinen keinen Cent für Bauteile ausgeben zu müssen. Findest du es nicht unfair, dass ich 75 Euro für Bauteile ausgebe und du nichts? Außerdem kannst du mir nicht erzählen, dass du wirklich alle Teile bekommen hast. Das sind ja um die 50 verschiedenen Teile die dir die einzelnen firmen einfach geschenkt haben sollen? Niemals.
-
Has du denn auch HW Version 4.7? Wenn ich es richtig sehe musst du auch zum Lötkolben greifen, weil du bei HW 4.7 kein SPI rausgeführt hast. Dafür wird Vedder dann den "Servo Input" missbraucht haben. Und um den missbrauchten Pin nutzen zu können darf halt kein Lowpass zwischengeschaltet sein.