Duffman
-
Gesamte Inhalte
535 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
1
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von Duffman
-

Nennspannung / Fahrspannung Unterschied ?
Duffman antwortete auf kuba's Thema in: Elektro-Skateboard Werkstatt
Hallo Barney, hab den Rechner eben auch mal ausführlich getestet. Von der Funktion her hab ich nichts zu beanstanden. Alles was ich getestet habe, hat fehlerfrei funktioniert. Ein paar Dinge sind mir aber trotzdem aufgefallen: Ich fände es gut, wenn das aus den Ritzelgrößen berechnete Übersetzungsverhältnis (i) auch direkt angezeigt werden würde, oder noch besser direkt eingegeben werden könnte. (z.B. bei mehrstufigen Getrieben sinnvoll) Bei der Auswahl der Motortypen fehlt mir die Möglichkeit eigene Daten einzugeben bzw. Sondermotoren zu konfigurieren. Außerdem wäre es gut, wenn man die Anzahl der verbauten Motoren eingeben könnte. (Ist bei der Berechnung glaube ich noch nicht relevant, interessanter wird es dann aber bei den Ergebnissen) Ähnlich sieht es bei den Akkudaten aus, dort fehlt mir auch die Möglichkeit eigene Daten einzugeben (->LiPo) Um die Bedienung etwas klarer zu gestalten wäre es gut, wenn sich die Felder in die Daten eingegeben werden können optisch von den Feldern die berechnete Daten anzeigen unterscheiden würden. (Grau hinterlegen?) Gruß Peter -
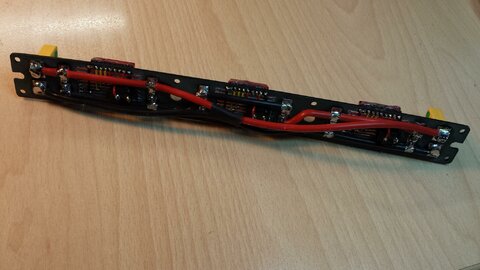
Akku Anschlusspanel mit 3x Lipo Warner - Vorderseite
Duffman kommentierte Duffman's Galerie-Bild in E-Boarder Alben
 Hallo Hugo, das hat den einfachen Hintergrund, dass ich 3 Paar 4S Akkus einsetze und jedes Akkupaar einzeln überwachen wollte. Möglich gewesen wäre es mit 2 Lipowächtern auszukommen.
Hallo Hugo, das hat den einfachen Hintergrund, dass ich 3 Paar 4S Akkus einsetze und jedes Akkupaar einzeln überwachen wollte. Möglich gewesen wäre es mit 2 Lipowächtern auszukommen. -
Nee nee, 35° war die Lufttemperatur im Schatten. Gefahren bin ich auf ner trockenen Wiese in der prallen Sonne und die Motoren waren jenseits von Gut und Böse. Jedenfalls so heiß, dass sich die Epoxi Verklebungen im Motor gelöst haben.
-
Gerade gesehen, dass sich da was überschnitten hat: Beatbuzzer hat natürlich recht, dass man es mit der Temperatur nicht gleich übertreiben sollte und den Motor nur soweit aufheizt, dass sich die Verklebung löst. Allerdings scheint der Lackdraht bei den NTM Motoren recht Temperaturfest zu sein, das wirst du spätestens merken, wenn du die neu verschalteten Litzen wieder neu verlöten willst. Von meinem Lötkolben lies sich die Lackschicht nämlich nicht beeindrucken, da musste ich mal kurz mit dem Brenner ran. (mechanisch wollte ich den Lack nicht entfernen um die dünnen Drähte nicht (wieder) abzureißen) Im Augeblick schlage ich mich allerdings mit anderen Problemen rum: Die 4.10-4 mini Quad / Mobo Reifen scheinen echt nicht viel zu taugen, bzw. sind meiner Fahrweise nicht gewachsen. Die Reifen sind gerade mal einen Monat drauf. Einen hat es schon komplett zerlegt und die anderen haben auch schon riesen Risse... Da muss ich mir wohl was anderes überlegen, allerdings möchte ich auch nicht unbedingt auf die klobigen schweren Kartreifen wechseln...
-
Die Isolation der Litzen kann noch deutlich höhere Temperaturen ab, 200° sollten die locker wegstecken. Bei meiner Testfahrt sind die Motoren aus mehreren Gründen so heiß geworden: Erstens hatte ich halt nur 2 statt 4 Motoren am Board und dadurch mussten sie halt doppelt so viel Leisten. Zweitens wollte ich natürlich auch mal sehen was so geht und welche Steigungen man denn so schafft und drittens waren an dem um die 35°. Seit dem ich 4 Motoren dran habe werden diese auch selten mehr als Handwarm, egal in welchem Gelände ich mich bewege.
-
4.10-4 Reifen sind doch nicht so robust wie sie aussehen...
Duffman hat ein Bild in der Galerie erstellt in: E-Boarder Alben
-
4.10-4 Reifen sind doch nicht so robust wie sie aussehen...
Duffman hat ein Bild in der Galerie erstellt in: E-Boarder Alben
-
4.10-4 Reifen sind doch nicht so robust wie sie aussehen...
Duffman hat ein Bild in der Galerie erstellt in: E-Boarder Alben
-
4.10-4 Reifen sind doch nicht so robust wie sie aussehen...
Duffman hat ein Bild in der Galerie erstellt in: E-Boarder Alben
-
4.10-4 Reifen sind doch nicht so robust wie sie aussehen...
Duffman hat ein Bild in der Galerie erstellt in: E-Boarder Alben
-
Hallo Boesila, jetzt fängt die Fummelarbeit an... Ich hab den harten Weg gewählt und die Schrumpfschläuche der Motoranschlusskabel mit Heißluft erhitzt und mit diversen geraden und abgewinkelten Pinzetten durch die Lüftungsöffnungen des Motorgehäuses herausgeprokelt. Danach hab ich die Litzen entzwirbelt, neu sortiert, verlötet und verschrumpft. Es sollte allerdings deutlich einfacher werden, wenn du es schaffst den Stator vom Motorgehäuse zu trennen. Ich hatte dabei damals aufgegeben, da sich mit sanfter Gewalt nicht bewegt hat und ich nichts kaputt machen wollte. Bei den ersten Testfahrten mit 2 Motoren, sind diese allerdings so heiß geworden, dass sich die Statoren auf den Motorgehäusen verdreht haben und letztendlich recht einfach abziehen ließen. Soll heißen: Pack die Motoren (ohne Motorglocke mit den Magneten!!!) mal bei 150°-200°C in den Backofen und versuch dann den Stator vom Gehäuse zu trennen. Mach auf jeden Fall Bilder von der Operation, damit ich dir weiter helfen kann und damit wir das Ganze anschließend mal ins Wiki bringen können. Gruß Peter
-
Hallo Nizz, ich hab noch einige unbestückte VESC 4.7 Platinen abzugeben. Gruß Peter
-
Hallo Gerald, Schön das es dir gefällt. Hab deinen Bauthread mehrmals gelesen und als Inspiration für mein Board genommen. Speziell did Entscheidung auf vier kleinere Motoren statt auf zwei Dicke zu setzen hat sich aus deiner Aussage entwickelt, dass es bei dir mit zweien grenzwertig war. Richtig Offroad ist halt doch was anderes als auf Waldwegen bergauf zu fahren... Ob ich es nochmal so machen würde? Für Offroad ja, aber für den Hasslocher Dirt Track muss ich mir doch noch was leichteres bauen ;-) Es sei denn ich darf nächstes jahr mit Spikes antreten...
-
Da hast du nicht ganz unrecht. Beim nächsten Motor mach ich Fotos und versuch mich am Wiki.
-
Die Änderung der Verschaltung ist in der Theorie nicht schwer, in der Praxis jedoch seeehr fummleig. Ich hab leider keine Bilder gemacht deshalb versuch ich es mal so gut ich kann zu erklären: Die Wicklung von den bei uns eingesetzten Brushlessmotoren besteht unabhängig vom Wicklungsschema aus 3 Spulen die jeweils einen Anfang (A, B, C) und ein Ende (A', B', C') haben. Die meisten Motoren werden in der Dreiechsschaltung ausgeliefert, das bedeutet das jeweils das Ende der einen Wicklung mit dem Anfang der nächsten Wicklung verbunden ist. ->A'-B mit B'-C und C'-A Bei den Motoren die ich bisher in den Händen hatte, bestand die Wicklung aus vielen parallel geschalteten dünnen Einzeldrähten die am Anfang und Ende mit den anderen Wicklungen verzwirbelt und gemeinsam auf ganzer Länge verzinnt waren. Den Großteil der verzinnten Litze habe ich abgeschnitten und dann mit Lötkolben und Pinzette versucht die Einzeldrähte zu separieren. Wenn man das geschafft hat, muss man die Drähte wieder so sortieren, dass man wieder drei Wicklungen mit jeweils 2 Anschlüssen bekommt. (Gucken, Fummeln, Prokeln und Messen) Für die Sternschaltung verbindet man nun jeweils die Enden der einzelnen Wicklungen miteinander (A'-B'-C') und lötet die neuen Anschlusskabel an die Anfänge der Wicklungen A B C. Der Sternpunkt wird nicht angeschlossen. Der Faktor um den sich die Motorparameter ädern ist Wurzel 3 also ca. 1,7. Bedeutet in meinem Fall: aus 270KV werden 155KV und aus 1,73Nm bei 50A werden 3Nm bei 50A. Dadurch kann man den Motor problemlos mit höherer Spannung betreiben, da durch die niedrigere KV die Enddrehzahl sinkt. Dabei muss man aber beachten, dass die Leistung des Motors gleich bleibt, nur der Arbeitspunkt verschiebt sich. Das Ganze ist also am einfachsten als das elektrische Pendant zum Getriebe zu verstehen. Gruß Peter
-
Ja ein paar offene Baustellen hab ich noch: - Hall Sensoren testen - Heel Straps, damit's mit dem Maulen noch besser klappt - Kettenabdeckung drucken, damit das Panzerband wegkommt - Lenkungsdämpfer - Gehäuse für Tacho und Ladezustandsanzeige drucken - Licht Aber nächstes Jahr brauch ich für den Dirt Track noch was anderes. Hab mich gefühlt wie der Monstertruck unter den Rennbuggys. Der Trend geht ja eh zum Zweitboard... @Beatbuzzer: Ich meld mich dann mal, wenn ich mal wieder in der nähe von Alfeld bin. Dann können wir ja mal gemeinsam die Berge unsicher machen...
-
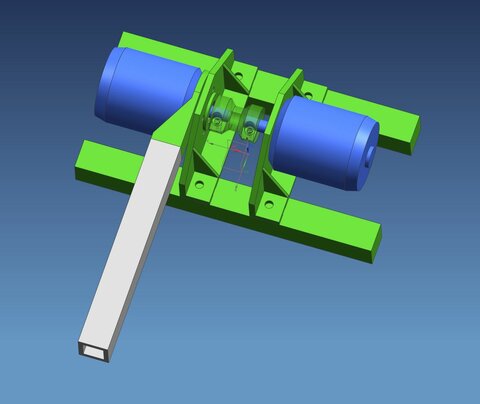
Hallo zusammen, wie in Hassloch versprochen möchte ich euch hier mein Board präsentieren. Basis ist ein MBS Pro 90 Deck. Passend dazu hab ich mir MBS Matrix Pro Achsen besorgt, doch halt: Von wegen passend. Ich hatte übersehen, dass das Deck für Skateachsen vorgesehen ist nur 20° Tip Angle hat. Da ich das Deck gebraucht bei •••• gekauft hatte und auch nicht auf Skateachsen wechseln wollte, blieb mir nichts anderes übrig als Adapterkeile drucken und diese zwischen Deck und Achsen zu montieren. Da ich mit dem Board "richtig" Off-Road unterwegs sein wollte, erschienen mir die normalen Mountainboardreifen zu klein und zu schmal. Die Kartreifen waren mir allerdings schon wieder zu groß und hatten für Off-Roadeinsatz nicht das richtige Profil. Fünding geworden bin ich schließlich bei Mini-Quad-Vorderreifen. Diese haben mit 4.10-4 für mich die richtige Größe und ein grobes Stollenprofil, mit dem sie auch bei voller Leistung auf der Wiese nicht durchdrehen. Bezahlbar ist das Ganze auch: der nackte Reifen kostet bei •••• 15€ und das komplette Vorderrad mit Felge und Bremsscheibenaufnahme 25€. Um die breiteren Reifen auf die Matrix-Achsen zu bekommen, mussten die original Achsstummel raus und durch neue längere ersetz werden. Da ein Off-Roader natürlich Allradantrieb braucht, musste ich auch bei den Motoren vom Standard abweichen: Hätte ich 4 Stück von den bewährten 6374 Motoren genommen, wäre das Board noch schwerer geworden als es, hauptsächlich durch die Reifen, eh schon ist. Also habe ich mich dazu entschlossen 4 Hobbyking NTM5060 Motoren einzusetzen um etwas Gewicht zu sparen. Da die Leistung auf 4 Motoren verteilt ist, gibt es mit den kleinen Motoren auch in schwerem Gelände absolut keine Temperaturprobleme. Bei der Suche nach passenden Reglern bin ich zum Glück früh genug auf den von Benjamin Vedder (http://www.vedder.se) entwickelten und im späteren Verlauf VESC getauften Regler aufmerksam geworden. Nach intensiver Lektüre seines Blogs und des dazugehörigen Threads bei ES habe ich dann irgendwann einen Stapel PCBs bei Hackvana in Hong Kong und einen Karton voll SMD Bauteile bei Mouser bestellt. Ein paar Tage später mit viel Fummeln, Löten und Basteln, mit Lötnadel, Heissluft und Mikroskop lagen dann endlich 5 fertige VESC vor mir auf dem Tisch. Dann noch "mal eben" ;-) Linux installiert, Firmware drauf, parametrieren, Daumen drücken, einschalten uuuuuuund LÄUFT. Ausgelegt habe ich das Board auf eine Geschwindigkeit von 40kmh. Das entspricht einer Raddrehzahl von ca. 880 min-1. Um die Ströme gering zu halten wollte ich die 12s die der VESC verträgt ausnutzen. Das hätte dazu geführt, dass die NTM5060 mit ihren 270KV bei vollem Akku mit 13.500min-1 laufen, was eine Übersetzung von 15:1 bedeutet und die Motoren übermäßig gequält hätte. Daher habe ich verschaltung der Motoren von Dreieck auf Stern geändert, was zu gemessenenen 150KV, damit an 12s zu 7.500min-1 und somit zu einer Gesamtübersetzung von ca. 8:1 geführt hat. Zur Kontrolle der ganzen Theorie hab ich dann auch noch "mal eben" einen kleinen Motorprüfstand gebaut, um das Motordrehmoment an verschiedenen Lastpunkten und Stömen zu bestimmen. Das wäre eigentlich einen eigenen Thread wert, daher nur kurz der Grundlegende Aufbau: Akku->VESC->Motor->Kupplung->Motor->VESC->Akku Der Generator speist zurück in den Akku aus dem der Motor angetrieben wird -> Perpetuum Mobile :-) der Motor ist fest gelagert, der Generator drehbar und stützt sich über einen 100mm langen Hebel auf einer Waage ab. Die ganze Aktion hat ergeben, dass der Motor bei den vorgesehenen 50A 3Nm bringt, das entspricht bei 7500min-1 2,35kW was wiederrum ganz gut zu den eingespeisten 2,5kW (50V 50A) passt. Bewaffnet mit Messdaten, ging es nun ans Auslegen des Getriebes. Einen Zahnriementrieb habe ich recht schnell verworfen, da er estens recht groß und klobing und zweitens ziemlich teuer geworden wäre. Als wirtschaftslichste Variante hat sich dann ein zweistufiges Kettengetriebe herausgestellt, bei dem jeweils ein Motor mit 17z:48z auf ein Zwischengelege mit 21z:60Z auf jeweils ein Rad wirkt. Die ungeraden Zähnezahlen und Übersetzungen sind Empfehlungen der Kettenhersteller um Schwingungen und damit Resonanzen zu vermindern. Als Akkus kommen 6 Stück 4s 5Ah 20c verschaltet zu 12s 10Ah 20c zum Einsatz. Diese können problemlos die 200A liefern, die die 4 jeweils auf 50A begrenzten Regler maximal ziehen können. Bei vollen Akkus entspricht das Ganze dann 10KW Antriebsleistung die ich aber noch nicht abrufen konnte, da ich vorher runterfliege oder aufgebe... Bei einer kurzen Messung mit der Stromzange kam ich beim Beschleunigen auf 90A und beim Bremsen auf -30A (Regeneration). Für mehr müsste ich wohl mal ein paar freiwillige abschleppen. Die 4 VESC Regler sind untereinander per CAN-Bus vernetzt und werten die jeweiligen Motordrehzahlen aus um eine Traktionskontrolle zu ermöglichen. Als Kontroller ist an einen der Regler der Empfänger von einem Nyko Kama Nunchuck direkt angeschlossen und steuert dadurch alle angeschlossenen Regeler gleichzeitig an. Also kurze Zusammenfassung: 1x MBS Pro 90 2x MBS Matrix Pro 2x MBS F2 Bindung 4x Mini Quad Vorderreifen 4.10-4 mit Felge 4x NTM5060 4x VESC 6x Turnigy 5000mAh 4S1P 14.8v 20C Hardcase Pack 1x Nyko Kama Nunchuck Ketten von Mädler gelaserte Beche von http://www.geerscutting.com/ PRO: - Power ohne Ende - auch in schwerem Gelände zu fahren - packt Steigungen die ich zu Fuss kaum packe - kann bremsen als ob man einen Anker wirft, ist aber fein dosierbar - robust, keine über die Reifen überstehenden Teile CONTRA: - recht schwer - 20kg fahrbereit - noch keine Sensoren daher noch Anfahrschwächen am Berg - nicht gerade leise - recht hoher Rollwiederstand durch 4 Motoren und 4 Getriebe So sieht es aus wenn man seine Freunde fahren lässt und einer 2m vor nem Baum einen kurzen Gasstoss gibt: Ausser den beiden Rohren ist aber nichts kaputt gegangen, jetzt sind massive 12er Rundstäbe drinnen für bessere Energieaufnahme ;-) Die 3D-Daten von dem Board bei Thingiverse: http://www.thingiverse.com/thing:1900477 Das wars fürs erste. Hoffe die Bilder sind da. Schöne Grüße aus Hannover Peter
-
einfacher Motorprüfstand um das erreichbare Drehmoment zu ermitteln
Duffman hat ein Bild in der Galerie erstellt in: E-Boarder Alben
-
-
-
Achse mit Motorhalteblechen und montierten NTM5060
Duffman hat ein Bild in der Galerie erstellt in: E-Boarder Alben
-
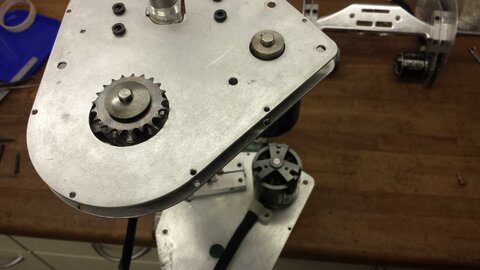
Erste Stufe vom Kettentrieb mit Zwischengelege
Duffman hat ein Bild in der Galerie erstellt in: E-Boarder Alben
-
Achse mit Motorhalteblechen und montierten NTM5060
Duffman hat ein Bild in der Galerie erstellt in: E-Boarder Alben
-
Akku Anschlusspanel mit 3x Lipo Warner - Rückseite
Duffman hat ein Bild in der Galerie erstellt in: E-Boarder Alben