

Dude
-
Gesamte Inhalte
555 -
Benutzer seit
-
Letzter Besuch
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von Dude
-
Und was steht da jetzt links und rechts von den Pfeilen als Überschrift? Am meisten irritieren mich solche Angaben wir "The servo input (you have to remove the lowpass filter on the servo input) C3" wo ich gleich meine, ich muss zum Lötkolben greifen und weiß nichtmal warum ...
-
Hab meinen Post dahingehend geändert (org. wireless statt org.).
-
Das war auch mein Gedanke. Aber nach dem Öffnen hab ich bemerkt, dass der Schalter im org. wireless Nunchuk über die Platine fixiert wird, auf die er gelötet ist. Beim Kama finde ich die Lösung eigentlich am besten: kein Schalter und wenn über eine gewisse Zeit kein Signal übertragen schaltet er sich ab. Nice! Das wird zunächst wohl so eine Heisskleberlösung :thumbsup:
-
Hab mir die bestellt http://www.••••.de/itm/351601910288, bis dahin mit raushängendem USB-Stecker-Kabel ...
-
Wie kann ich mir die Liste "in schön" ansehen?
-
Danke für den Hinweis, dann frag ich mal den Meister selbst.
-
Nur so aus Neugierde: warum musste man beim VESC dann zuerst mit dem STM-Entwicklerboard den Bootloader draufspielen?
-
Ich mach jetzt mal einen neuen Thread zu dem Thema auf, da sich im Netz nur vereinzelt Hinweise hierzu finden und ich es für ein sehr gutes Tool halte. Leider hab ich es noch nicht zum Laufen gebracht und würde gern mal wissen, wie Ihr das hin bekommen habt. Elkick, ich hab aus Deinen Beiträgen rausgelesen, dass Du es wohl schon geschafft hast. Also, dann fang ich mal an. Der VESC selbst läuft bei mir stabil in BLDC- und FOC-Mode unter FW2.15. Vorgehen: Der funktionierende VESC wird über USB mit dem Rechner verbunden. Steuerung über Nunchuk. Webcam ist meine integrierte FaceTime CAM am Mac. Dann passiert je nach Betriebssystem folgendes: 1. Ubuntu VM (BLDC-logger selbst compiliert): Video wird aufgenommen (und ich kann mir danach mein verdutztes Gesicht ansehehn), der VESC macht nach dem Start von BLDC-logger keinen Muks mehr, nix. BLDC-Tool starten und was seh ich: die Parameter in der FW sind total verkorkst und ich muss den VESC nochmal rebooten, bis ich endlich die FW mit dem BLDC-Tool auslesen kann. xml wieder einlesen und auf dem VESC spielen ... :confused5: 2. OSX Native (BLDC-logger aus dem Netz): Wie oben, Video mit frustriertem Gesicht, VESC nach Start des loggers ohne Lebenszeichen ... 3. Windows VM (BLDC-logger aus dem Netz): kein Video, vom VESC wird was ausgelesen und in die Datei BLDC-Values geschrieben, aber in jeder Zeile stehen die gleichen Werte. Zumindest wird der VESC nicht ins Nirwana befördert und ich kann ihn ohne mehrmaligen Reboot und aufspielen der Motorkonfiguration weiter betreiben ... :mad: Zusammenfassung: auf allen mir zur Verfügung stehenden Betriebssystemen versucht, nich geht, sch... Von meinem Ziel, das Tool auf einem kleinen Einplatinencomputer mit CAM zum laufen zu bringen bin ich meilenweit entfernt.:mad: Es wäre super hilfreich, wenn Ihr mir Euer Vorgehen beschreibt und mit welchem Setup es geklappt hat. Ich hab den Verdacht, dass es u.U. an der neuen FW 2.15 liegt, mit der der Logger nicht richtig kann.
-
Freut mich sehr! Dann werd ich mich mal an's Löten meiner Platine machen. Ich hab das ja unter Linux laufen (im Ziel) und muss mal sehen, wie ich es da angehe. Fragen, die mir so spontan in den Sinn kommen: - Das hex-File ist sozusagen die Firmware, die Du Dir aus den Sourcen von Benjamin compiliert hast (nunchuk_mod)? Ich muss da wohl so eine Art 'make upload' durchführen. - Die Widerstände für die Kanalwahl beim Empfänger sind meines Wissens auf dem VESC. Die sollten dann ja passen, hoffe ich. - Da kein Bootloader drauf ist, muss ich mit dem STM Entwicklerboard dazwischen programmieren
-

Streetboard Eigenbau Konfigurationscheck, Verbesserungen erwünscht
Dude antwortete auf Rollexus's Thema in: Eigenbauten
Ich tippe auf die Fahrbahnneigung. -
Bezugsquelle gebogene NdFeB Magnete ?
Dude antwortete auf George's Thema in: Elektro-Skateboard Werkstatt
Das gefällt mir! In welchem kV Bereich? Vllt. wirst Du hier fündig: http://www.powermagnetshop.de Kennst Du den Beitrag? Ich weiß allerdings nicht, ob er was taugt ... http://www.instructables.com/id/Make-Your-Own-Miniature-Electric-Hub-Motor/ -
FOC mit HALL-Sensoren dreht bei mir bombe an :thumbsup: Beliebig langsam, mit oder ohne Last, Hammer (FW2.15) Ich hab allerdings die PID Parameter unter Speed control, Reiter Advanced angepasst (KP = 0,002 / KI = 0,01 / KD = 0,00005). Die müssen im FOC-Modus anders gewählt werden als im BLDC-Modus. Leider kann ich die PID-Parameter nicht nach allen Regeln der Kunst einstellen, hierzu wäre ein Live-Plot der ERPM im Diagramm hilfreich, dann könnte man das Einschwingverhalten auf eine Sprungvorgabe sehen und die Parameter tunen. Weiß jemand, od das geht?
-
Wer von Euch hat den Logger schon verwendet? Ich verwende VESC HW4.7 mit der neuesten Firmware 2.15_FOC. Nachdem ich den VESC mit dem BLDC-Tool eingestellt habe, trenne ich ihn vom Rechner - funktioniert mit dem Kama Nunchuk einwandfrei. Dann verbinde ich ihn wieder mit dem Mac und starte den BLDC-Logger (compilierte iOS-Version aus ES Forum). Video wird aufgenommen aber der VESC reagiert mehr nicht auf den Kama, einfach nur Stille :mad: ... erst nach einen Reboot und Aufspielen der Konfiguration mit dem BLDC-Tool bekomm ich ihn wieder zum laufen. Wie macht Ihr das? :skep:
-
Neidisch?
-
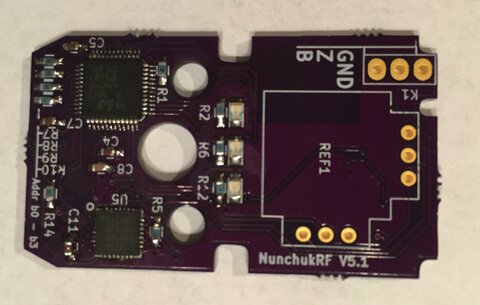 Ersetzt die Platine im "normalen" Nunchuck und stellt über UART eine Verbindung zum VESC her. Da wo REF1 steht kommt der Joystick aus dem Nunchuk drauf, sollte ins Gehäuse passen. Damit wird die Steuerung des VESC programmierbar und ich kann z.B. eine Funkabrisserkennung aufsetzen oder den Zusammenhang zwischen Joystickauslenkung und Signalvorgabe am VESC parametrieren. Außerdem bin ich dann von dem Kama unabhängig, dessen Preise mittlerweile immer mehr steigen.
Ersetzt die Platine im "normalen" Nunchuck und stellt über UART eine Verbindung zum VESC her. Da wo REF1 steht kommt der Joystick aus dem Nunchuk drauf, sollte ins Gehäuse passen. Damit wird die Steuerung des VESC programmierbar und ich kann z.B. eine Funkabrisserkennung aufsetzen oder den Zusammenhang zwischen Joystickauslenkung und Signalvorgabe am VESC parametrieren. Außerdem bin ich dann von dem Kama unabhängig, dessen Preise mittlerweile immer mehr steigen. -
Schritt 1: PCB löten Mein erstes selbst gelötetes SMD-PCB mit Mikrocontroller (Oberseite).
-
Vom Album Nunchuk RF
-
Hallo Hexacopter, wie ist der aktuelle Stand - werden noch Besteller benötigt oder hast Du schon genügend Interessenten für Deine PCB's?
-
http://www.••••.de/itm/311361394811?_trksid=p2060353.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT
-
Suche einen Empfänger für meinen Nunchuk Kama (wireless), nehme ggf. auch den Sender mit dazu. Dude
-
Hi Barney, ich mach gerade weitere Gehversuche in Sachen SMD löten. Hast Du Interesse an einer bestückten Nunchuck-NRF Platine von Vedder zum Testen? https://endless-sphere.com/forums/viewtopic.php?f=35&t=74609 Den UART/USB Converter hab ich schon drauf - Lötpaste, Heißluft und so, da alle Anschlüsse unten. Bei Interesse schick mir eine PN ...
-
So langsam weiß ich , wo der Hase langläuft. Die Bottom-Ansicht im Bild Layout ist ein Durchsicht ... für einen Ingenieur sind alle Ansichten immer Draufsichten (so technische Zeichnung mäßig), also war die Bottom Ansicht für mich von unten und ich hab die Platine und Anschlüsse in Gedanken gedreht um zu sehn wie das dann von oben aussen würde :thumbsup:
-
Schon wieder was gelernt. Dummerweise ist auf dem VESC von Vedder P1 tatsächlich (zufällig?) Pin eins. Als Newbee lebt man oft von Muster erkennen und übertragen, in diesem Fall hat's nix geholfen
-
Offline test des modifizierten Motors mit Hall-Sensoren: tadelloses Anfahrverhalten, auch mit Last. Interessant ist, dass die optimale Winkelposition der Sensoren je nach Drehrichtung unterschiedlich ist - beim Umschalten der Drehrichtung via Nunchuk-Kama + VESC. Ist deutlich hörbar, der Motor läuft unrunder und knattert. Wie das ist, wenn man die Drehrichtung durch Vertauschen zweier Anschlüsse durchführt hab ich noch nicht probiert - je nachdem wie das in der VESC SW realisiert ist hat man auch dann das selbe Verhalten. War mir so nicht bewusst und die Einstellmöglichkeit muss bei Dual-Motor-Setup dringend beachtet werden. [video=BLDC Motor mit Hallsensoren]513 Wie ich das in die Hubmotor-Konstruktion einbette weiß ich allerdings noch gar nicht. Danke an Barney für den Support! Ach ja, auf der Platine ist der Pin 1 des Steckers mit P1 beschriftet (zumindest hab ich das so interpretiert). Das ist allerdings laut KiCad Schaltplan Pin6. Nachdem ich das berücksichtigt habe lief's auch gleich - zum Glück ging nix kaputt, da dadurch Vcc und GND vertauscht waren .
-
Suche Hilfe für Motorkonfiguration
Dude antwortete auf mick_we's Thema in: Elektro-Skateboard Werkstatt
Ginge das in die richtige Richtung? http://vedder.se/forums/viewtopic.php?f=5&t=29 Dude
