

elkick
-
Gesamte Inhalte
684 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
1
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von elkick
-
Geht leider nicht anders, da der VESC keinen extra Speicher für sowas verbaut hat. Es gibt bei ES einige Leute, die an einer Smartphone Portierung des BLDC Tools arbeiten, damit ginge das dann. Denke mal dass die ersten Testversionen in ein paar Wochen da sind. Das ist echt seltsam, über 80A total (extrem steile Garagenauffahrt, aus dem Stand anfahren) habe ich noch nie geschafft. Kann aber sein, dass sich die MTBs aufgrund der Übersetzung und Größe der Räder ganz anders verhalten und einiges mehr an Leistung brauchen. :confused5: Die 80A Spitze waren dem VESC ziemlich egal, wurde noch nicht mal warm.
-
Sieht gut aus, insbesondere der mit der Lüftung (auch wenn man keine Lüftung braucht). Ich würde allerdings die Akkus gegen Feuchtigkeit schützen, daher ist die zweiter Version wahrscheinlich geeigneter. Ausser du wohnst in einer Gegend in der nur die Sonne scheint! PS. Ich bin auch gerade dran ein Gehäuse zu laminieren, daher sind deine Beispiele als Idee sehr willkommen...
-
Nur eine Anmerkung: der VESC ist der erste ESC der primär zur eSkateboard Anwendung entwickelt wurde. D.h. die Modellbauregler haben insbesondere beim Beschleunigen und Bremsen eine ganz andere Zielsetzung. Lässt sich zwar alles Anpassen, kommt trotzdem nicht an den VESC ran.
-
Mittlerer Verbrauch sollte nicht wesentlich über 10Wh pro Kilometer liegen beim Streetboard (Daumenwert). Dein Motor hat eine Vollmacke!
-
Klar, mache ich!:thumbsup:
-
Wollt ihr nicht auf 12s/10AH gehen? Nur so eine Idee...
-
Hi Olli, welcome! Es gibt aber auch eBoard Fahrer die ab und zu dort auf Besuch sind (Herford). Ansonsten findest du hier im Bereich Eigenbauten einiges nützliches. Das Wiki wird auch stetig erweitert und enthält ein paar grundlegende Dinge. An die Abkürzungen muss man sich etwas gewöhnen, geht aber schon. Ich bin auch noch kein Jahr dabei.
-
Das mit dem Wiki ist schon eine gute Idee. Ich werde mal mit einer Installationsanleitung anfangen, nicht jeder mag sich das alles auf englisch durchlesen. Braucht aber ein paar Tage. Den Ubuntu Teil lasse ich erstmal weg, das kommt dann später, genauso Win und OSX.
-
Du solltest meine Daten aber möglichst nicht 1:1 verwenden, da die Motoren und Akkus unterschiedlich sind (50mm, 270kV, 7s). Die Motorerkennung soll den VESC genau auf dein Setup einstellen. Aber du könntest z.B. mal an Startup Boost (Advanced) und an min. ERPM rumtesten. Wird aber glaube ich nichts bringen, wenn dein Motor eine Macke hat und Stromspitzen verursacht. KV Werte im Tool werden als elektrische RPM ausgewiesen und mit null Last. Und die ersten Werte sind "Leerlauf".
-
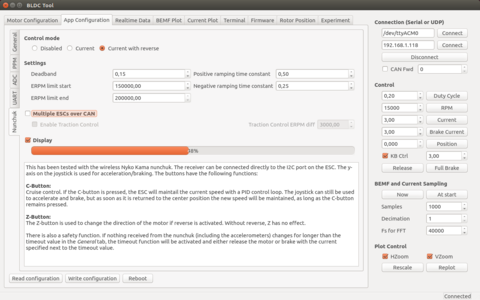
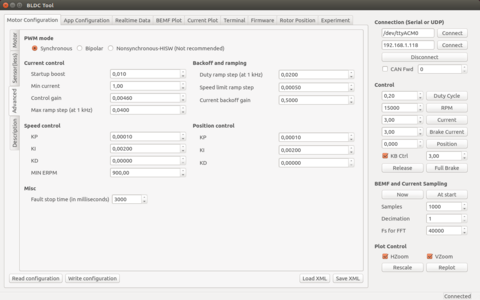
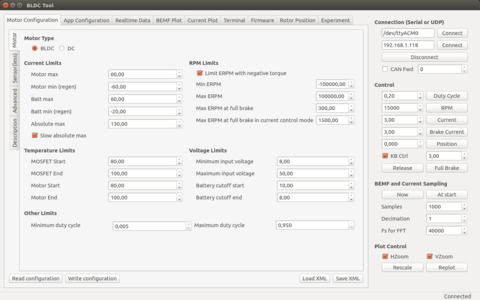
Hier ein paar Screenshots. Setup: 7s-6400mAh, Alien5060/270kV sensored, VESC 4.7/FW1.12. Ist aber alles nur eingeschränkt aussagekräftig, da ich hier mit 7s und einem 270kV Motor unterwegs bin. Aber nur mal so als Anhaltspunkt, xml Datei ist beigefügt. Ich gehe aber stark davon aus, dass dein Motor der Grund für die Fehler ist. Terminal - die ersten beiden Werte bei Null-Input, zweiten Werte mit Vollgas (ohne Last!): sensored_alien_16__9_15.xml.zip
-
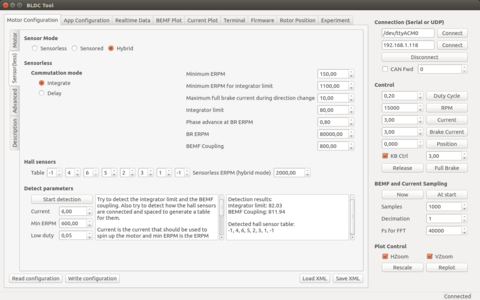
Vom Album ESCs
-

Terminal Output: Neutral & Vollgas (ohne Last, 7s)
elkick hat ein Bild in der Galerie erstellt in: E-Boarder Alben
.png.aff8fb2ef555f93a6bc3f335b5f90c50.png)
Vom Album ESCs
-
-
-
Vom Album ESCs
-
Vom Album ESCs
-
Vom Album ESCs
-
Deine Zusammenstellung passt ganz gut. Im Bereich Eigenbauten habe ich mein Miniboard mit einer Teileliste eingestellt, da findest du auch Kosten etc. Meine Töchter sind 6 & 11J., würden jeden Tag fahren, wenn ich sie denn ließe. Aber ich muss sagen, dass ich die beiden erst auf die Boards lasse, seit ich VESCs (Motorsteuerung dediziert entwickelt für Skateboards) verbaut habe. Das Anfahrverhalten, Beschleunigung und Höchstgeschwindigkeit lässt sich damit am einfachsten einstellen. Man könnte auch einfach Chrizz Board nehmen und dort nur noch einen VESC einbauen, fertig.
-
Ich habe noch ein paar ähnliche Motoren hier liegen und schaue mal nach, welche Werte mir da ausgegeben werden zum Vergleich. Die Übersetzung ist egal, bei den Radnabenmotoren habe ich z.B. ja 1:1 und trotzdem keine Probleme im oberen Bereich oder Vollgas geben.
-
Ich habe noch ein paar ähnliche Motoren hier liegen und schaue mal nach, welche Werte mir da ausgegeben werden zum Vergleich.
-
Das ist für flaches Gelände eher ungewöhnlich, sieht jedenfalls für mich so aus, dass sich dein Motor etwas seltsam verhält. 133A Spitzen sind für den Motor definitiv zu viel an einem Streetsetup. Nehme auch an, dass das nicht aufgefallen ist, weil dein alter ESC ein höheres Limit gesetzt hatte. Du kannst jetzt zwar das Ampere Limit hochsetzen, riskierst damit aber den VESC. Kannst du das Ganze mal mit einem anderen Motor testen? Habe bisher 4 verschiedene Motoren mit dem VESC verbaut, aber ans Limit von 130A bin ich auf der Straße noch nie gekommen. Auch nicht mit den 6374/149kV. Andere Frage: hast du den großen Kondensator sehr nahe montiert und festgelötet?
-
Log auslesen geht schon, wenn du den VESC nicht zwischendurch rebootest (ausschaltest). Reihenfolge: VESC mit BLDC Tool verbinden, "Read Configuration" anklicken, "Activate Sampling" selektieren (im Tab "Realtime Data"), vom Rechner trennen und Testfahrt machen, wieder connecten, nachsehen. Und dann gleich noch im Terminal auf Fehler prüfen.
-
Das hört sich danach an, dass der VESC bei grösserer Last dicht macht. Kann verschiedene Ursachen haben, alles etwas spekulativ. Wieviel Ampere kann der Motor max bei wieviel Volt? Was ist der C-Wert der Akkus? Verwendest Du ein BMS? Wackelkontakte ausgeschlossen? Ist das Nunchuk bzw. der Nunchuk Receiver ok und ohne Wackelkontakt (mittels JST-PH Stecker verbunden oder sind die einzelnen Drähte mit der Buchse verbunden)? Bevor du die einzelnen Werte im BLDC Tool änderst, würde ich von vorn anfangen. Motorerkennung nochmal durchführen (vorher "Read configuration" klicken) und unten links die Werte für die Erkennung (wie im Fenster beschrieben) mal etwas abändern. Wenn sich der Motor so verhält, wie von Benjamin in der Anleitung beschrieben (also Vollgas, dann Bremsen, dann langsames Drehen für min. 2sek (ohne Ruckeln oder komische Geräusche!) -> die erhaltenen neuen Werte wieder oben eintragen und speichern ("Write configuration"). Danach testen. PS. Montier den Nunchuk Receiver wenn's geht mal woanders hin, könnte sich auch um Signalabbrüche handeln!
-
Im BLDC Tool das Terminal benutzen um ev. Fehler auszulesen (Command: faults). Vorher die Werte lesen (Read - Button). Du kannst prinzipiell alle Werte im BLDC Tool deinen Anforderungen anpassen. Ohne dein Setup zu kennen kann man aber nur schwer einen Tipp geben...
-
Hilfe bei Verbindung zwischen Akku, BMS, Regler, ESC
elkick antwortete auf staegros's Thema in: Elektro-Skateboard Werkstatt
Nö, das ist ein komplettes Kabel inkl. Litze. Das passt schon. -
Hilfe bei Verbindung zwischen Akku, BMS, Regler, ESC
elkick antwortete auf staegros's Thema in: Elektro-Skateboard Werkstatt
Schau mal auf linergy-shop.de unter Zubehör nach, da gibt's das.


