elkick
-
Gesamte Inhalte
684 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
1
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von elkick
-
Läuft problemlos über das Servokabel. Pairing s. oben, dann geht's gut, brauchte ne Weile bis ich das raus hatte. Seitdem läuft das Teil jetzt seit 6 Monaten gut. Wie lange der Akku durchhält weiß ich aber nicht, da ich nach dem Fahren immer auflade.
-
Das Teil wird ganz normal über PPM/Servokabel angeschlossen. Der NRF ist auf der Receiver Leiterplatte drauf und stellt die bi-direktionale Kommunikation sicher.
-
Außerdem würde ich gerne hören, ob z.B. die VESC in meinem Fall nicht auch Overkill ist (schließlich kostet sie drei mal soviel wie die oben genannte vom Hobbyking). Overkill eher nicht, das ist der einzige auf unsere Bedürfnisse angepasste ESC. Ansonsten geht natürlich auch eine von HK, klar. <220Kv habe ich gelesen soll man gar nicht gehen weil dann die Ritzel unnötig klein werden - stimmt das? Nein, bei HTD5 kann man bis 12er Ritzel und/oder 32 Wheelpulley gehen ohne Probleme. Wo bekommt ihr die Riemen und Ritzel denn in DE her? Hug Technik, Conrad, Mädler Ich habe auf importieren keine Lust (das dauert nur, kostet extra und man muss womöglich beim Zoll vorbei). s.o. in meinem Beitrag. Wo kauft man ein BMS? Groetech, lipopower. Gibt es eine CAD Zeichnung einer Halterung für die Caliber? Fräsen lassen sollte kein Problem sein - die Werkstatt hier am Institut ist ziemlich gut bestückt. Bei Enertion findest du eine entsprechende Zeichnung. Im Prinzip kannst du alle meine o.g. Werte deinen Bedürfnissen nach unten anpassen.
-
Ich zitiere mich dann mal selbst: :-)
-

Elektro-Longboard bauen... Viele Fragen.. sehr viele
elkick antwortete auf BassKiwi's Thema in: Eigenbauten
Stefan hat schon recht - bevor du dir eine Einkaufsliste zusammenstellst: was ist denn eigentlich deine Zielsetzung? Reichweite, Geschwindigkeit, Gewicht der Boards, flaches Gelände oder viele Steigungen, Cruisen oder Speed racing, Dual/Single Setup, what ever...? Wenn du das weißt, wird's recht einfach mit dem Aussuchen der benötigten Teile und woher du die bekommst und zu welchem Preis. PS. Und bei Enertion kommt immer EUST drauf. -
Via USB geht das nicht, aber mit einem STLinkV2 unter Ubuntu ist das kein Problem. 2. Bild hier: http://vedder.se/2014/12/connecting-a-programmerdebugger-my-custom-stm32-pcbs/
-
Das ist kein VESC von uns. Was nichts an der Tatsache ändert, dass FOC mit Vorsicht zu genießen ist.
-
Wenn der Timeout kommt, den VESC kurz vom Strom trennen, wieder anschalten und gleich nochmal auf upload klicken. Der Timeout Fehler ist ab FW 2.x behoben!
-
Streetboard Eigenbau Konfigurationscheck, Verbesserungen erwünscht
elkick antwortete auf Rollexus's Thema in: Eigenbauten
Akku-(Sicherung:))-VESC-Motor, wenn du xt60 verwendest kannst du nichts falsch machen mit plus/minus wenn du richtig gelötet hast, d.h. die Reihenfolge beim Einstecken ist dann egal. 65-70mm Solange du keinen Kurzschluss baust, schon. Sicherer ist allerdings ein PC-Netzteil 16V-20V zu nehmen. -
Komplettes Dual Motor Setup. Welche Spannung 6S, 8S,..
elkick antwortete auf hive's Thema in: Elektro-Skateboard Werkstatt
Warum? Eher umgekehrt, vorausgesetzt der Motor kann auch wirklich 12s. So wirklich viele die für unsere Zwecke taugen gibt's allerdings nicht und die blumigen chinesischen Beschreibungen stimmen auch nicht immer. Daten gibt's hier: https://docs.google.com/spreadsheets/d/1fuahiw-FJLqgtYf-5d3W6AfFhiZ8a3FjsLbM79GZI_E/edit?usp=sharing Und zum Thema Lipo: warum keine 18650LiIon? Dann brauchst du auch keinen Waffenschrank... -
Willkommen, das passt schon mit 270kv. Hier mal eine Beispielkonfiguration, den Akku mit 6s ersetzen und den Motor mit deinem, dann hast du ein paar Richtwerte: http://www.elektro-skateboard.de/forum/showpost.php?p=34343&postcount=2
-
Streetboard Eigenbau Konfigurationscheck, Verbesserungen erwünscht
elkick antwortete auf Rollexus's Thema in: Eigenbauten
Nimm einfach ein altes PC/Laptop Netzteil. Nutze selber eines mit 18V zum testen (obwohl ich auch immer mit dem STLink zum Bootloader bzw. FW upload arbeite), funktioniert prima. FOC ist noch etwas experimentell, funktioniert aber soweit problemlos, mit FW 2.15 sowieso. -
Streetboard Eigenbau Konfigurationscheck, Verbesserungen erwünscht
elkick antwortete auf Rollexus's Thema in: Eigenbauten
Das sind keine Liion 18650er Zellen sondern Lipos in Tütenform aufeinander gestapelt. -
Glaube ich ehrlich gesagt nicht. Ich würde das Setup des VESCs an deiner Stelle nochmal von vorn machen, d.h. die Firmware auf die Defaultwerte (Motor und App) zurücksetzen und die Motordetection und die App Konfiguration nochmal durchführen. Und die Akkuwerte erst mal so lassen wie sie voreingestellt sind. Dazwischen immer die Werte mit "Write" sichern und unbedingt am Ende der App-Einstellungen "Write" und dann "Reboot" anklicken. Der Motor zieht zu keiner Zeit 73A wenn es flach ist. Eher 20-30A bei schnellem beschleunigen mit 10s.
-
Hört sich nach einem Einbruch der Leistung an. Bis du sicher dass die zwei 10s Packs auch beide die Leistung in Serie bringen? Und nicht parallel oder eines disconnected ist?
-
Ich weiss nicht, ob die Einstellung "Current" so gut ist bei der GT2B, jedenfalls nutze ich nur "Current with brake without reverse", da die GT2B nur via Schiebeschalter auf Reverse gesetzt werden kann. Cut-off start und -end scheinen ok zu sein (wobei ich normalerweise 35,5 und 33,5 nehme), aber was hast du bei "maximum input voltage" und "minimum input voltage" stehen?
-
Das ist gut so! Zur Erklärung: PPM ist etwas "old-fashioned" und alle anderen Ansteuerungen sind nicht so "binär" ohne Last, das ist nur bei PPM so.
-
Warum solte ich mich irren, wenn vor mir auf dem Tisch gerade ein Board liegt das genau das Verhalten ohne Last unter PPM zeigt, mit Last aber ganz normal fährt?:confused5: Kann ja sein, dass es bei anderen an was anderem liegt.
-
Das ist bei mir auch so. Sobald das Ganze aber unter Last betrieben wird, ist das Verhalten völlig korrekt, d.h. er beschleunigt auch so wie man das will.
-
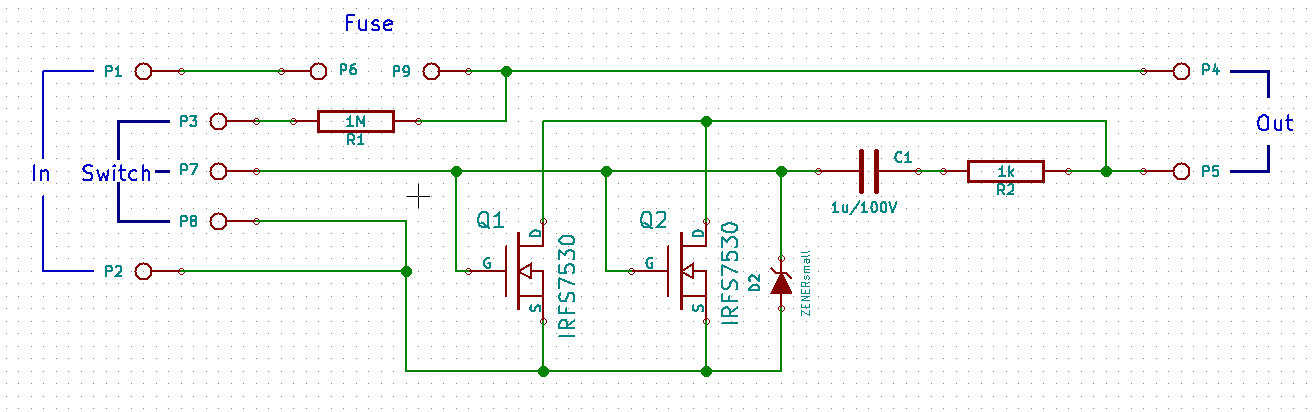
Power Switch mit Sicherung made in Germany
elkick antwortete auf Attila's Thema in: Elektro-Skateboard Werkstatt
Wir liefern mit 40A continuos (60A Peak für bis zu 5-10sek) aus, wer mehr braucht kann aber auch den Halter entfernen oder einen anderen anlöten und z.B. mit einer 100A ersetzen. Kenne auch Leute die das machen und mit 80A bzw. 100A fahren. Die von dir verlinkte Sicherung passt. Enertion verbaut in der Space Call 30A. Der Halter stammt von einem Automobilzulieferer direkt und wurde für unsere Zwecke geringfügig angepasst, aber den gibt's so ähnlich auch im Retailbereich. Als DiY-Lösung würde ich aber eine dem Setup angemessene Sicherung direkt auf die Platte löten und zusätzlich ein Überbrückungskabel mit Stecker für Notfälle unterwegs verbauen. Ist mit Sicherheit günstiger. -
Die Größe der Leiterplatte ist bisher schon ok, aber die Leistungsfähigkeit der von dir genannten Teile ist beeindruckend! Wäre zumindest zu überlegen, bei der nächsten HW Revision in die Richtung zu gehen (trotz der 1,30€ Differenz). Andreas scheint sich ja auf RC Anwendung zu konzentrieren und dort ist der VESC sicher noch nicht optimal, vor allem bei niedriger Spannung und hohem Dauerstrom.
-
BLDC-Tool V1.14 Update unter Linux
elkick antwortete auf kuba's Thema in: Elektro-Skateboard Werkstatt
Wenn 2.13 auch ok ist, findest du die Ubuntu Version hier. -
Sehe ich auch so, die maschinelle Bestückung mit Überprüfung geht sicher. Und für die Prototypen wird eben ne kleine Stückzahl vorne dran geschaltet. Wäre schon gut wenn Benjamin mit dabei wäre und wenn's dann auf KiCad ist, dürfte er auch mit machen.
-
Kostet zwar 2€ mehr, wäre die Differenz aber schon wert. Verglichen mit dem irf7350 sind's dann immerhin nur noch 1,30€. Das Vorhaben wird aber so wie's aussieht ohne Benjamin stattfinden.
-
Power Switch mit Sicherung made in Germany
elkick antwortete auf Attila's Thema in: Elektro-Skateboard Werkstatt
Es wird vorgeladen: